

Relating reflex gain modulation in posture control to underlying neural network properties using a neuromusculoskeletal model
- PMID: 20865310
- PMCID: PMC3108017
- DOI: 10.1007/s10827-010-0278-8
Relating reflex gain modulation in posture control to underlying neural network properties using a neuromusculoskeletal model
Abstract
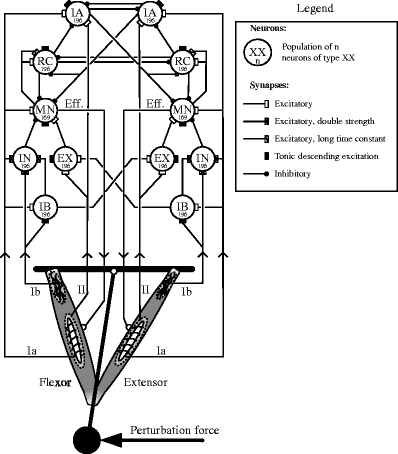
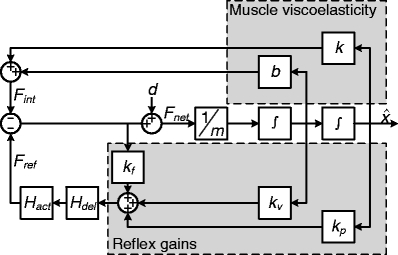
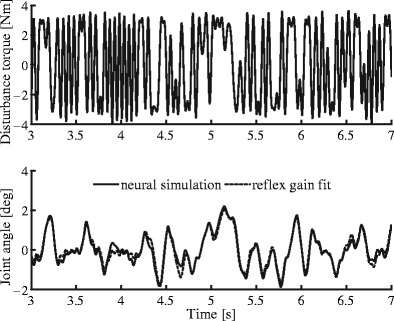
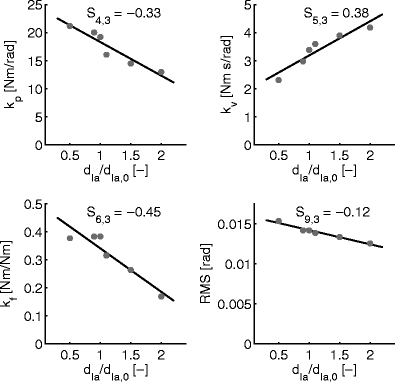
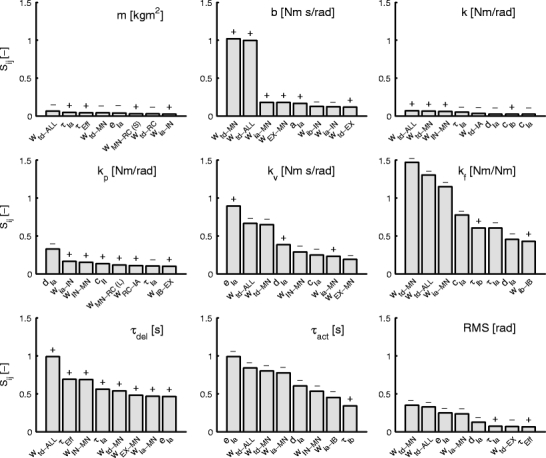
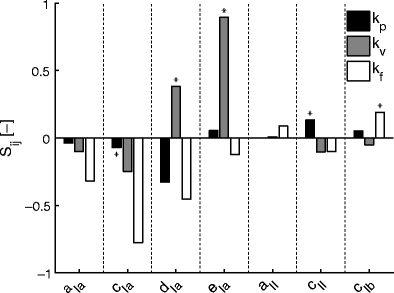
During posture control, reflexive feedback allows humans to efficiently compensate for unpredictable mechanical disturbances. Although reflexes are involuntary, humans can adapt their reflexive settings to the characteristics of the disturbances. Reflex modulation is commonly studied by determining reflex gains: a set of parameters that quantify the contributions of Ia, Ib and II afferents to mechanical joint behavior. Many mechanisms, like presynaptic inhibition and fusimotor drive, can account for reflex gain modulations. The goal of this study was to investigate the effects of underlying neural and sensory mechanisms on mechanical joint behavior. A neuromusculoskeletal model was built, in which a pair of muscles actuated a limb, while being controlled by a model of 2,298 spiking neurons in six pairs of spinal populations. Identical to experiments, the endpoint of the limb was disturbed with force perturbations. System identification was used to quantify the control behavior with reflex gains. A sensitivity analysis was then performed on the neuromusculoskeletal model, determining the influence of the neural, sensory and synaptic parameters on the joint dynamics. The results showed that the lumped reflex gains positively correlate to their most direct neural substrates: the velocity gain with Ia afferent velocity feedback, the positional gain with muscle stretch over II afferents and the force feedback gain with Ib afferent feedback. However, position feedback and force feedback gains show strong interactions with other neural and sensory properties. These results give important insights in the effects of neural properties on joint dynamics and in the identifiability of reflex gains in experiments.
Figures
Similar articles
-
Quantifying proprioceptive reflexes during position control of the human arm.IEEE Trans Biomed Eng. 2008 Jan;55(1):311-21. doi: 10.1109/TBME.2007.899298. IEEE Trans Biomed Eng. 2008. PMID: 18232375
-
Analysis of reflex modulation with a biologically realistic neural network.J Comput Neurosci. 2007 Dec;23(3):333-48. doi: 10.1007/s10827-007-0037-7. Epub 2007 May 15. J Comput Neurosci. 2007. PMID: 17503169 Free PMC article.
-
Quantification of intrinsic and reflexive properties during multijoint arm posture.J Neurosci Methods. 2006 Sep 15;155(2):328-49. doi: 10.1016/j.jneumeth.2006.01.022. Epub 2006 Feb 28. J Neurosci Methods. 2006. PMID: 16504304
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
-
Internal models of limb dynamics and the encoding of limb state.J Neural Eng. 2005 Sep;2(3):S266-78. doi: 10.1088/1741-2560/2/3/S09. Epub 2005 Aug 31. J Neural Eng. 2005. PMID: 16135889 Free PMC article. Review.
Cited by
-
Spinal mechanisms may provide a combination of intermittent and continuous control of human posture: predictions from a biologically based neuromusculoskeletal model.PLoS Comput Biol. 2014 Nov 13;10(11):e1003944. doi: 10.1371/journal.pcbi.1003944. eCollection 2014 Nov. PLoS Comput Biol. 2014. PMID: 25393548 Free PMC article.
-
Neural-driven activation of 3D muscle within a finite element framework: exploring applications in healthy and neurodegenerative simulations.Comput Methods Biomech Biomed Engin. 2024 Dec;27(16):2389-2399. doi: 10.1080/10255842.2023.2280772. Epub 2023 Nov 15. Comput Methods Biomech Biomed Engin. 2024. PMID: 37966863
-
Integration of neural architecture within a finite element framework for improved neuromusculoskeletal modeling.Sci Rep. 2021 Nov 26;11(1):22983. doi: 10.1038/s41598-021-02298-9. Sci Rep. 2021. PMID: 34836986 Free PMC article.
-
Cognition and balance control: does processing of explicit contextual cues of impending perturbations modulate automatic postural responses?Exp Brain Res. 2017 Aug;235(8):2375-2390. doi: 10.1007/s00221-017-4980-x. Epub 2017 May 10. Exp Brain Res. 2017. PMID: 28493066
-
Assessing Neural Connectivity and Associated Time Delays of Muscle Responses to Continuous Position Perturbations.Ann Biomed Eng. 2021 Jan;49(1):432-440. doi: 10.1007/s10439-020-02573-2. Epub 2020 Jul 23. Ann Biomed Eng. 2021. PMID: 32705425 Free PMC article.
References
-
- Abbink, D. A., van der Helm, F. C. T., & Boer, E. R. (2004). Admittance measurements of the foot during ‘maintain position’ and ‘relax’ tasks on a gas pedal. In Systems, man and cybernetics, 2004 IEEE international conference on (Vol. 3, pp. 2519–2524).
-
- Crago PE, Houk JC, Rymer WZ. Sampling of total muscle force by tendon organs. Journal of Neurophysiology. 1982;47(6):1069–1083. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
