

Robot-assisted airway support: a simulated case
- PMID: 20870983
- PMCID: PMC4046321
- DOI: 10.1213/ANE.0b013e3181ef73ec
Robot-assisted airway support: a simulated case
Abstract
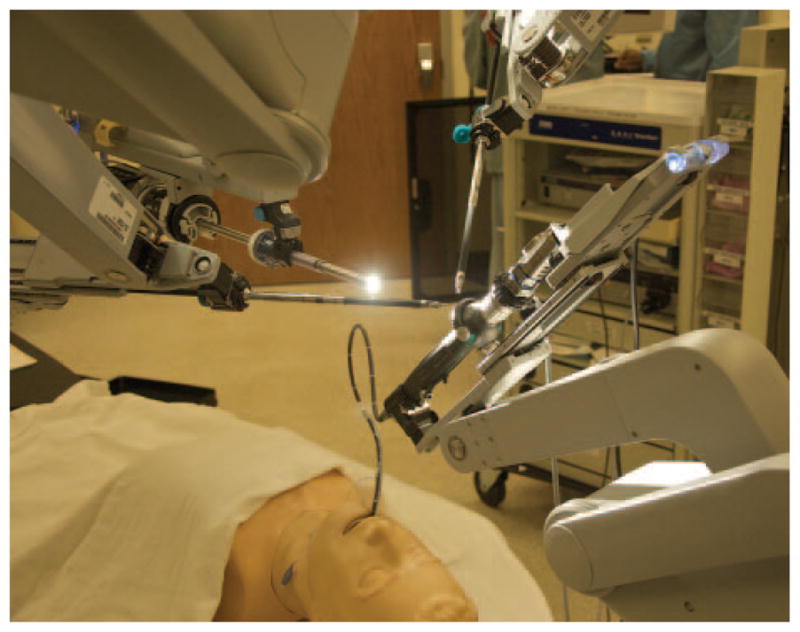
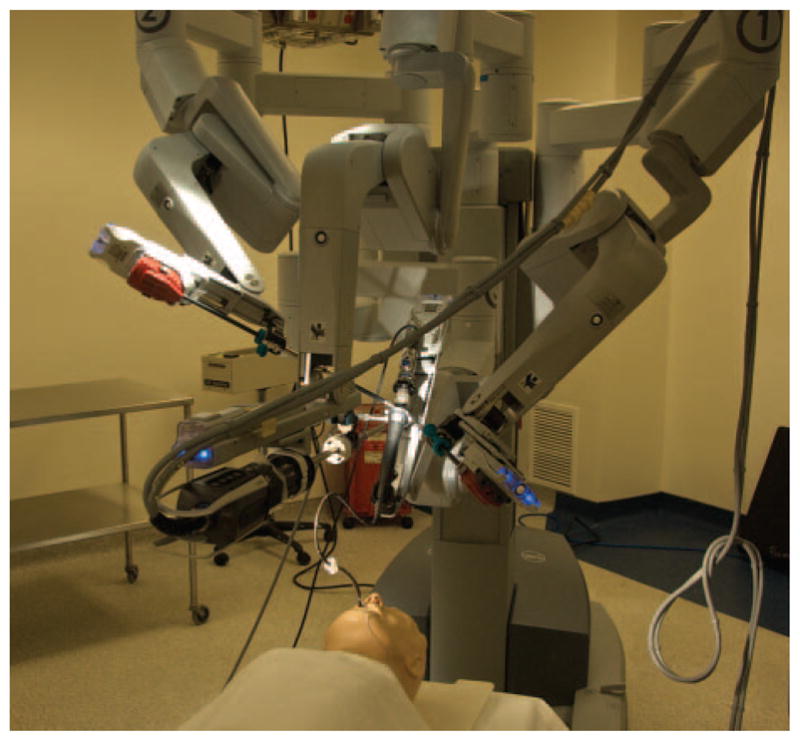
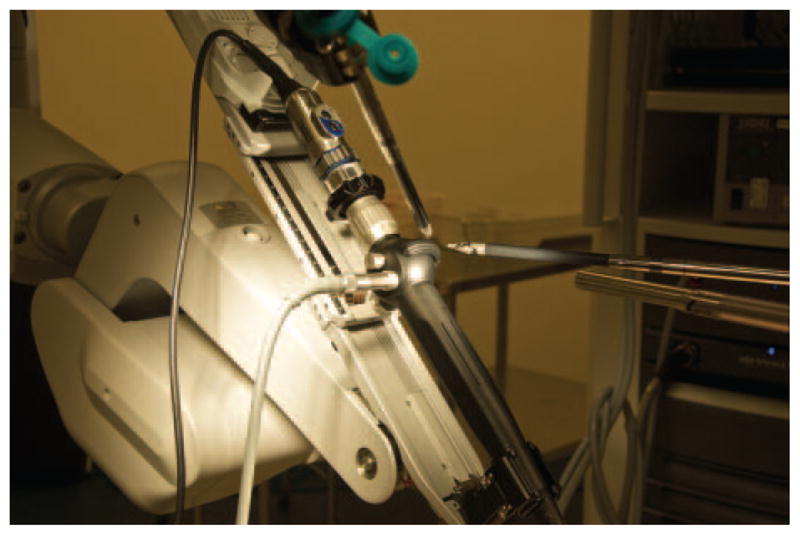
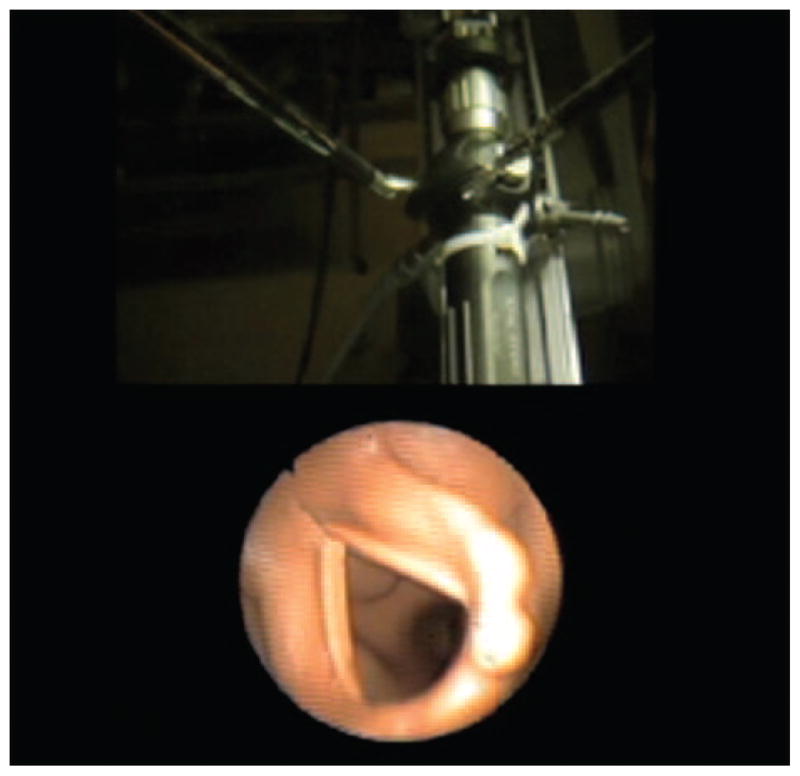
Recent advances in telemedicine and robotically assisted telesurgery may offer advanced surgical care for the geographically remote patient. Similar advances in tele-anesthesia will be necessary to optimize perioperative care for these patients. Although many preliminary investigations into tele-anesthesia are underway, none involves remote performance of anesthesia-related procedures. Here we describe simulated robotically assisted fiberoptic intubations using an airway simulation mannequin. Both oral and nasal approaches to fiberoptic intubation were successful, but presented unique opportunities and challenges inherent to the robot's design. Robotically assisted airway management is feasible using multipurpose surgical robotic systems.
Figures
References
-
- Hemmerling TM. Automated anesthesia. Curr Opinion Anaesthesiol. 2009;103:811–6. - PubMed
-
- Bhayani S, Snow D. Novel dynamic information integration during da Vinci robotic partial nephrectomy and radical nephrectomy. J Robotic Surg. 2008;2:67–9. - PubMed
-
- Rogers CG, Laungani R, Bhandari A, Krane LS, Eun D, Patel MN, Boris R, Shrivastava A, Menon M. Maximizing console surgeon independence during robot-assisted renal surgery by using the fourth arm and TilePro. J Endourol. 2009;23:115–22. - PubMed
-
- Harnett BM, Doarn CR, Rosen J, Hannaford B, Broderick TJ. Evaluation of unmanned airborne vehicles and mobile robotic telesurgery in an extreme environment. Telemed e-Health. 2008;14:539–44. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
