

Review
doi: 10.1097/JES.0b013e3181f45194.
Control of human limb movements: the leading joint hypothesis and its practical applications
Affiliations
- PMID: 20871237
- PMCID: PMC2965031
- DOI: 10.1097/JES.0b013e3181f45194
Item in Clipboard
Review
Control of human limb movements: the leading joint hypothesis and its practical applications
Exerc Sport Sci Rev.
2010 Oct.
Abstract
The leading joint hypothesis (LJH) offers a novel interpretation of control of human movements that involve multiple joints. The LJH makes control of each multijoint movement transparent. This review highlights effective applications of the LJH to learning of new motor skills and to analysis of movement changes caused by aging and motor disorders.
Figures
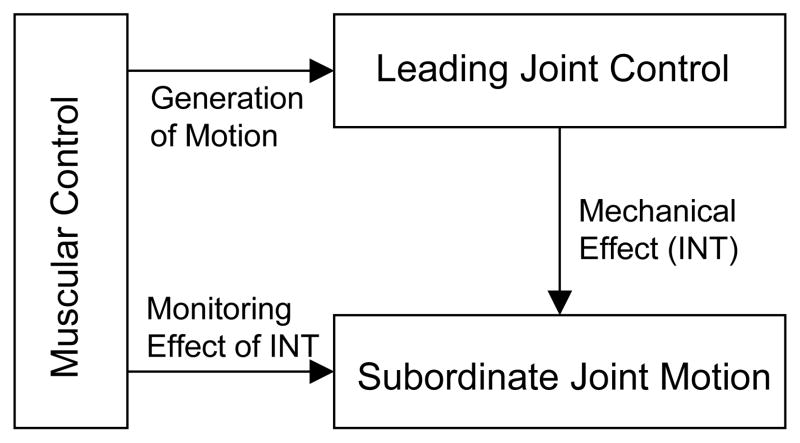
Schematic representation of organization of control of multijoint movements suggested by the LJH. The control exploits passive INT generated at the subordinate joint by leading joint motion.
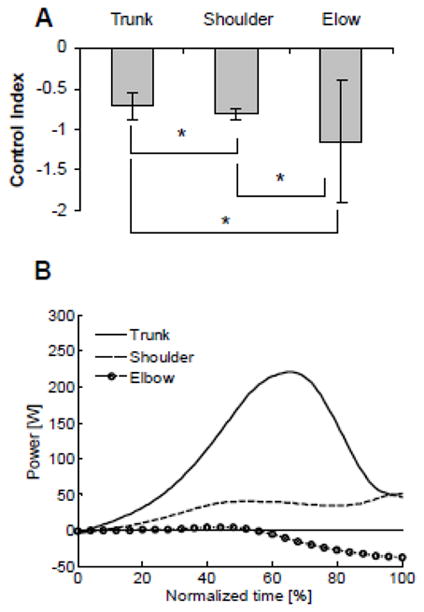
Characteristics of control of trunk rotation and shoulder and elbow extension during horizontal arm swing. A, Mean values of the CI. *Significant differences between levels. B, Power of trunk, shoulder, and elbow MUS. Both characteristics demonstrate that trunk MUS played the dominant role in the production of motion, the shoulder served primarily to transfer the effect of trunk motion to the elbow, and the elbow moved largely passively. (Reprinted from Kim, Y.K., R.N. Hinrichs, and N. Dounskaia. Multicomponent control strategy underlying production of maximal hand velocity during horizontal arm swing. J. Neurophysiol. 2009;102(5):2889–99. Copyright © 2009 The American Physiological Society. Used with permission.)
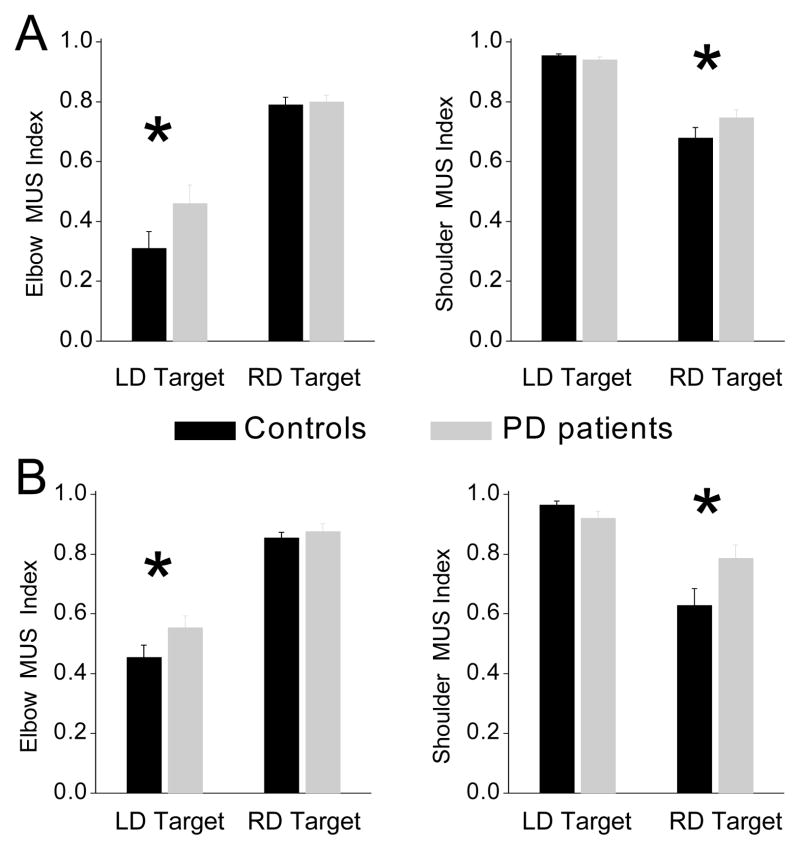
The shoulder and elbow MUS index in PD patients and controls during (A) cyclic and (B) discrete pointing movements to the LD and RD targets. The asterisks indicate that there was a trend in patients to increase the MUS index at the elbow for the LD target and at the shoulder for the RD target. Data were compiled from Fradet et al. (23).
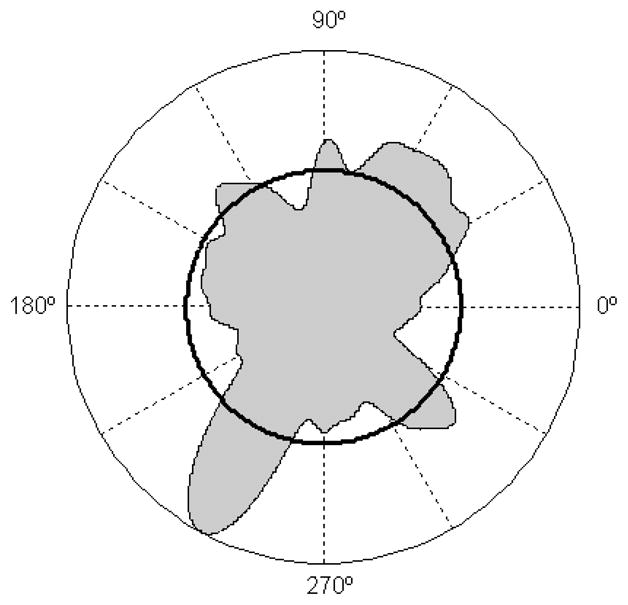
Smoothed polar histogram showing distribution of stroke orientations for 15 participants who performed the free-stroke drawing task (29). The black circle denotes the uniform distribution that could be achieved with the same number of strokes. The deviations of the histogram curve from the black circle reveal biases to produce movements in the two diagonal directions. Data were compiled from Goble et al. (29).
References
-
- Berthier NE, Clifton RK, McCall DD, Robin DJ. Proximodistal structure of early reaching in human infants. Exp Brain Res. 1999;127(3):259–69. - PubMed
-
- Bhat AN, Galloway JC. Toy-oriented changes in early arm movements III: constraints on joint kinematics. Infant Behav Dev. 2007;30(3):515–22. - PubMed
-
- Conditt MA, Gandolfo F, Mussa-Ivaldi FA. The motor system does not learn the dynamics of the arm by rote memorization of past experience. J Neurophysiol. 1997;78(1):554–60. - PubMed
-
- Dounskaia N. The internal model and the leading joint hypothesis: implications for control of multi-joint movements. Exp Brain Res. 2005;166(1):1–16. - PubMed
-
- Dounskaia N, Ketcham CJ, Leis BC, Stelmach GE. Disruptions in joint control during drawing arm movements in Parkinson’s disease. Exp Brain Res. 2005;164(3):311–22. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
