

Optimality vs. variability: an example of multi-finger redundant tasks
- PMID: 20949262
- PMCID: PMC3230275
- DOI: 10.1007/s00221-010-2440-y
Optimality vs. variability: an example of multi-finger redundant tasks
Abstract
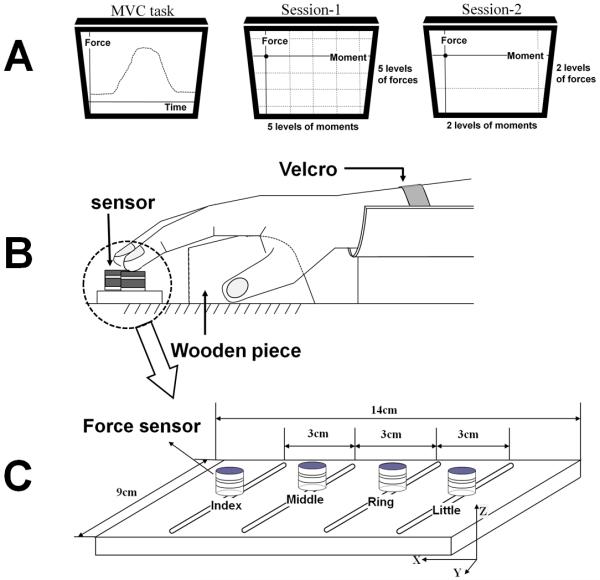
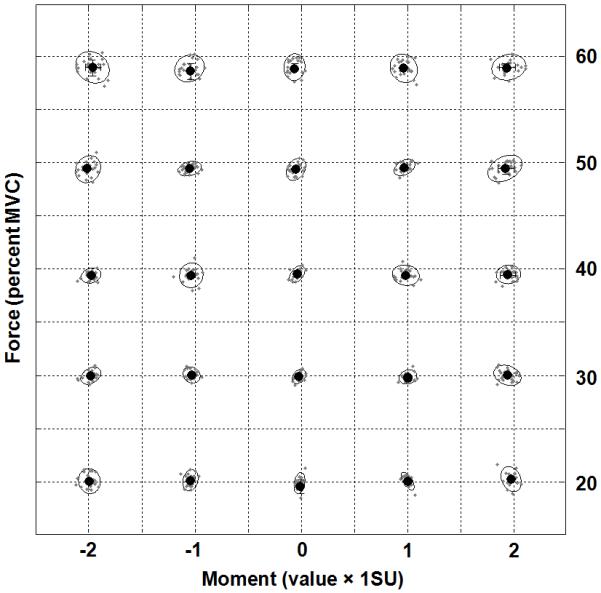
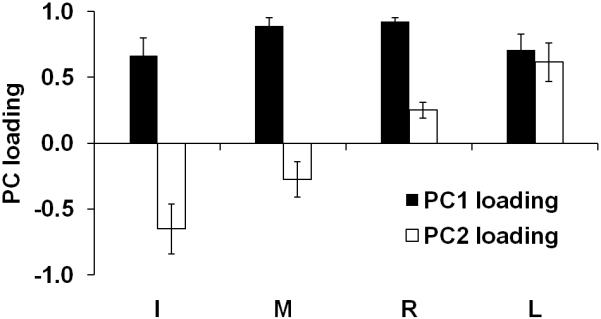
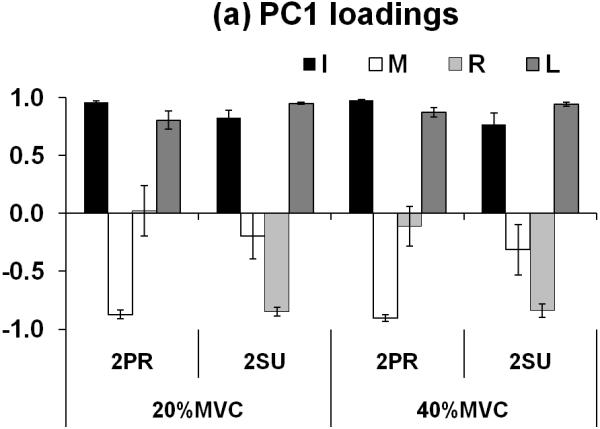
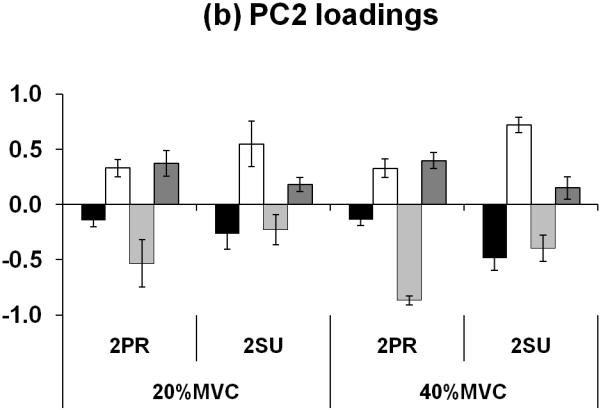
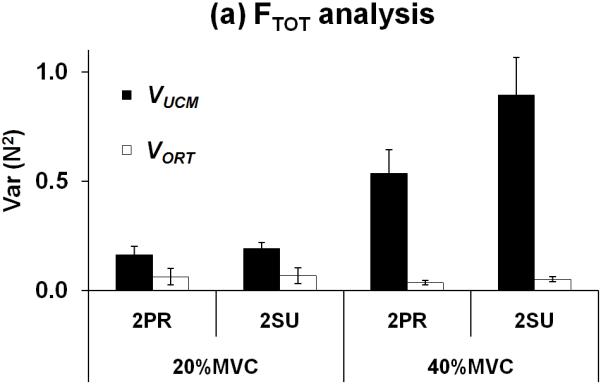
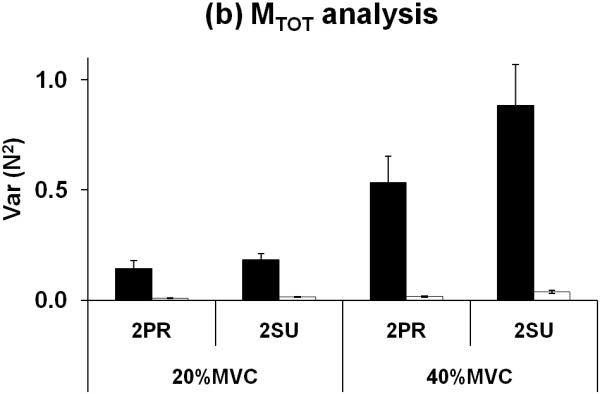
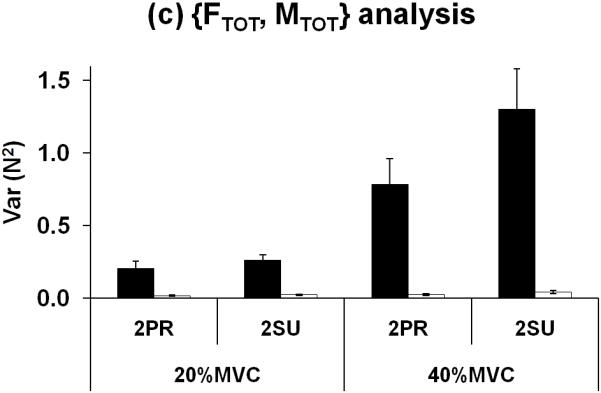
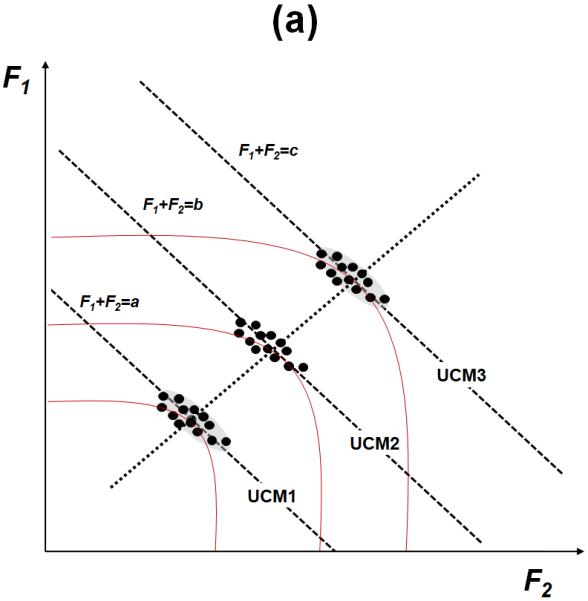
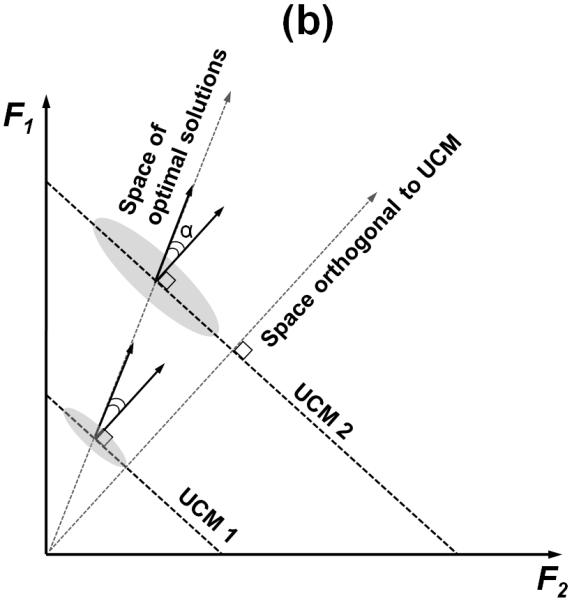
Two approaches to motor redundancy, optimization and the principle of abundance, seem incompatible. The former predicts a single, optimal solution for each task, while the latter assumes that families of equivalent solutions are used. We explored the two approaches using a four-finger pressing task with the requirement to produce certain combination of total normal force and a linear combination of normal forces that approximated the total moment of force in static conditions. In the first set of trials, many force-moment combinations were used. Principal component (PC) analysis showed that over 90% of finger force variance was accounted for by the first two PCs. The analytical inverse optimization (ANIO) approach was applied to these data resulting in quadratic cost functions with linear terms. Optimal solutions formed a hyperplane ("optimal plane") in the four-dimensional finger force space. In the second set of trials, only four force-moment combinations were used with multiple repetitions. Finger force variance within each force-moment combination in the second set was analyzed within the uncontrolled manifold (UCM) hypothesis. Most finger force variance was confined to a hyperplane (the UCM) compatible with the required force-moment values. We conclude that there is no absolute optimal behavior, and the ANIO yields the best fit to a family of optimal solutions that differ across trials. The difference in the force-producing capabilities of the fingers and in their moment arms may lead to deviations of the "optimal plane" from the subspace orthogonal to the UCM. We suggest that the ANIO and UCM approaches may be complementary in the analysis of motor variability in redundant systems.
Figures
References
-
- Ait-Haddou R, Jinha A, Herzog W, Binding P. Analysis of the force-sharing problem using an optimization model. Math Biosci. 2004;191:111–122. - PubMed
-
- Bernstein NA. The co-ordination and regulation of movements. Pergamon Press; Oxford: 1967.
-
- Bottasso CL, Prilutsky BI, Croce A, Imberti E, Sartirana S. A numerical procedure for inferring from experimental data the optimization cost functions using a multibody model of the neuro-musculoskeletal system. Multibody Syst Dyn. 2006;16:123–154.
-
- Feldman AG. Once more on the equilibrium-point hypothesis (lambda model) for motor control. J Mot Behav. 1986;18:17–54. - PubMed
-
- Feldman AG, Levin MF. The origin and use of positional frames of reference in motor control. Behav Brain Sci. 1995;18:723–806.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
