

Functional anatomy of the cheetah (Acinonyx jubatus) hindlimb
- PMID: 21062282
- PMCID: PMC3077520
- DOI: 10.1111/j.1469-7580.2010.01310.x
Functional anatomy of the cheetah (Acinonyx jubatus) hindlimb
Abstract
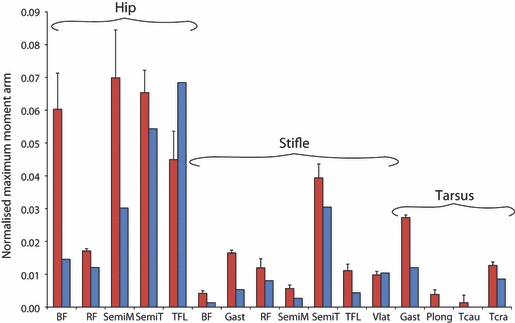
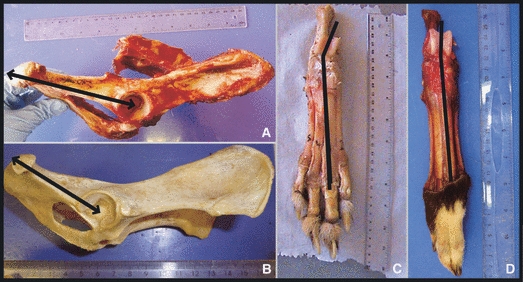
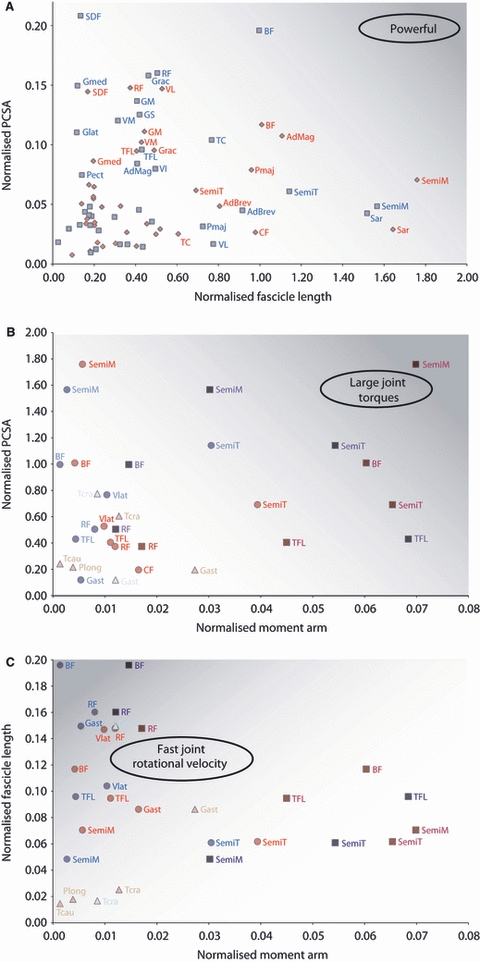
The cheetah is capable of a top speed of 29 ms(-1) compared to the maximum speed of 17 ms(-1) achieved by the racing greyhound. In this study of the hindlimb and in the accompanying paper on the forelimb we have quantified the musculoskeletal anatomy of the cheetah and greyhound and compared them to identify any differences that may account for this variation in their locomotor abilities. Specifically, bone length, mass and mid-shaft diameter were measured, along with muscle mass, fascicle lengths, pennation angles and moment arms to enable estimates of maximal isometric force, joint torques and joint rotational velocities to be calculated. Surprisingly the cheetahs had a smaller volume of hip extensor musculature than the greyhounds, and we therefore propose that the cheetah powers acceleration using its extensive back musculature. The cheetahs also had an extremely powerful psoas muscle which could help to resist the pitching moments around the hip associated with fast accelerations. The hindlimb bones were proportionally longer and heavier, enabling the cheetah to take longer strides and potentially resist higher peak limb forces. The cheetah therefore possesses several unique adaptations for high-speed locomotion and fast accelerations, when compared to the racing greyhound.
© 2010 The Authors. Journal of Anatomy © 2010 Anatomical Society of Great Britain and Ireland.
Figures
References
-
- Alexander RM. Why Mammals Gallop 1. Integr Comp Biol. 1988;28:237–245.
-
- Alexander RM. Optimization of structure and movement of the legs of animals. J Biomech. 1993;26(Suppl. 1):1–6. - PubMed
-
- Alexander RM. Principles of Animal Locomotion. Princeton: Princeton University Press; 2003.
-
- Alexander RMN, Jayes AS. Vertical movements in walking and running. J Zool Lond. 1978;185:27–40.
-
- Alexander RM, Dimery NJ, Ker RF. Elastic structures in the back and their role in galloping in some mammals. J Zool. 1985;207:467–482.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
