

General approach to first-order error prediction in rigid point registration
- PMID: 21075718
- PMCID: PMC4607070
- DOI: 10.1109/TMI.2010.2091513
General approach to first-order error prediction in rigid point registration
Erratum in
- IEEE Trans Med Imaging. 2011 Nov;30(11):2012
Abstract
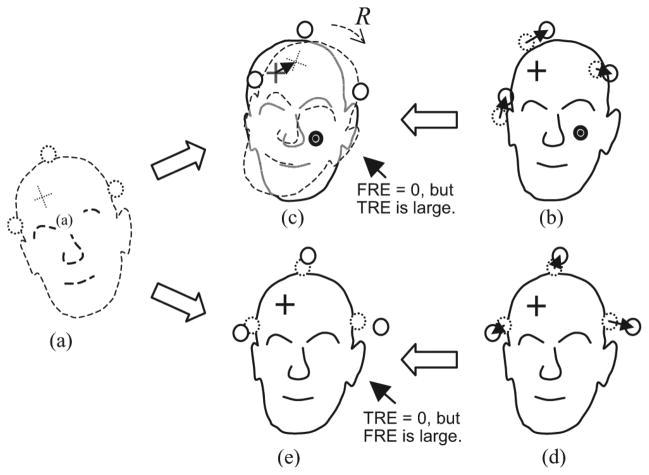
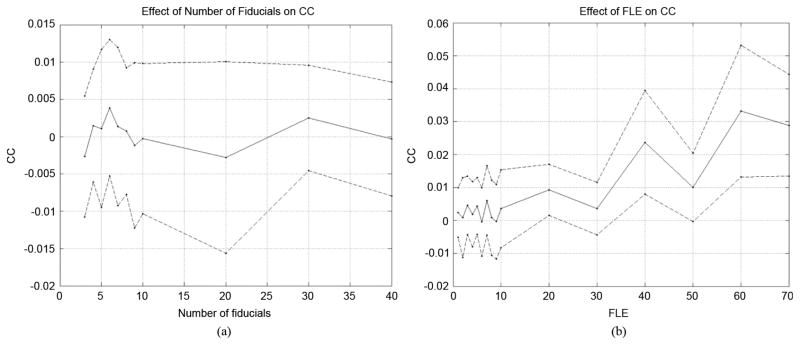
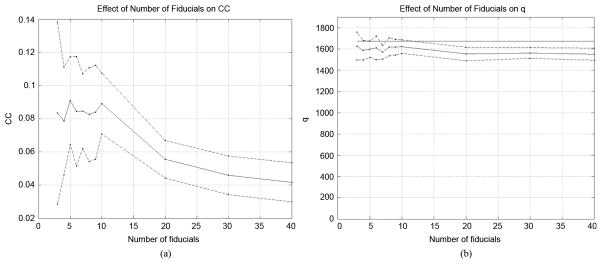
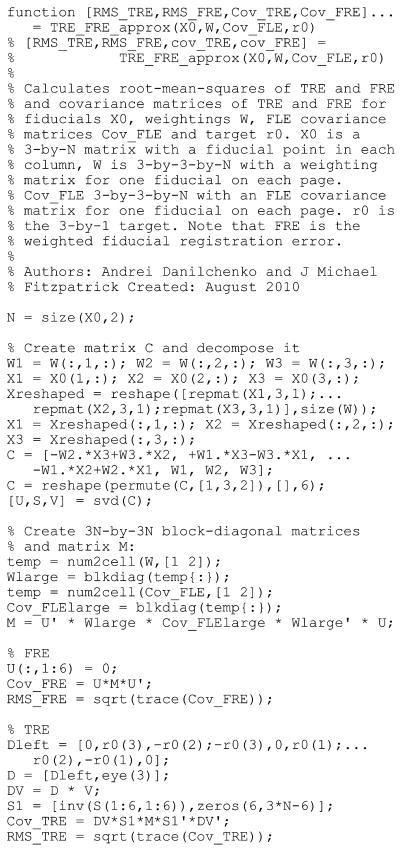
A general approach to the first-order analysis of error in rigid point registration is presented that accommodates fiducial localization error (FLE) that may be inhomogeneous (varying from point to point) and anisotropic (varying with direction) and also accommodates arbitrary weighting that may also be inhomogeneous and anisotropic. Covariances are derived for target registration error (TRE) and for weighted fiducial registration error (FRE) in terms of covariances of FLE, culminating in a simple implementation that encompasses all combinations of weightings and anisotropy. Furthermore, it is shown that for ideal weighting, in which the weighting matrix for each fiducial equals the inverse of the square root of the cross covariance of its two-space FLE, fluctuations of FRE and TRE are mutually independent. These results are validated by comparison with previously published expressions and by simulation. Furthermore, simulations for randomly generated fiducial positions and FLEs are presented that show that correlation is negligible (correlation coefficient < 0.1) in the exact case for both ideal and uniform weighting (i.e., no weighting), the latter of which is employed in commercial surgical guidance systems. From these results we conclude that for these weighting schemes, while valid expressions exist relating the covariance of FRE to the covariance of TRE, there are no measures of the goodness of fit of the fiducials for a given registration that give to first order any information about the fluctuation of TRE from its expected value and none that give useful information in the exact case. Therefore, as estimators of registration accuracy, such measures should be approached with extreme caution both by the purveyors of guidance systems and by the practitioners who use them.
Figures
References
-
- Danilchenko A, Fitzpatrick JM. General approach to error prediction in point registration. presented at the SPIE Med. Imag; San Diego, CA. Feb. 2010..
-
- Fitzpatrick JM. Fiducial registration error and target registration error are uncorrelated. presented at the SPIE Med. Imag; Lake Buena Vista, FL. Feb. 2009..
-
- Steinmeier R, Rachinger J, Kaus M, Ganslandt O, Huk W, Fahlbusch R. Factors influencing the application accuracy of neuron-avigation systems. Stereotactic Functional Neurosurg. 2000;75:188–202. - PubMed
-
- Woerdeman PA, Willems PW, Noordmans HJ, Tulleken CA, van der Sprenkel JW. Application accuracy in frameless image-guided neurosurgery: A comparison study of three patient-to-image registration methods. J Neurosurg. 2007 Jun;106(6):1012–6. - PubMed
-
- Sibson R. Studies in the robustness of multidimensional scaling: Perturbational analysis of classical scaling. Journal of the Royal Statistical Society: Series B. 1979;41:217–229.
