

Relationships among low-frequency local field potentials, spiking activity, and three-dimensional reach and grasp kinematics in primary motor and ventral premotor cortices
- PMID: 21273313
- PMCID: PMC3075284
- DOI: 10.1152/jn.00532.2010
Relationships among low-frequency local field potentials, spiking activity, and three-dimensional reach and grasp kinematics in primary motor and ventral premotor cortices
Erratum in
- J Neurophysiol. 2011 Sep;106(3):1599
Abstract
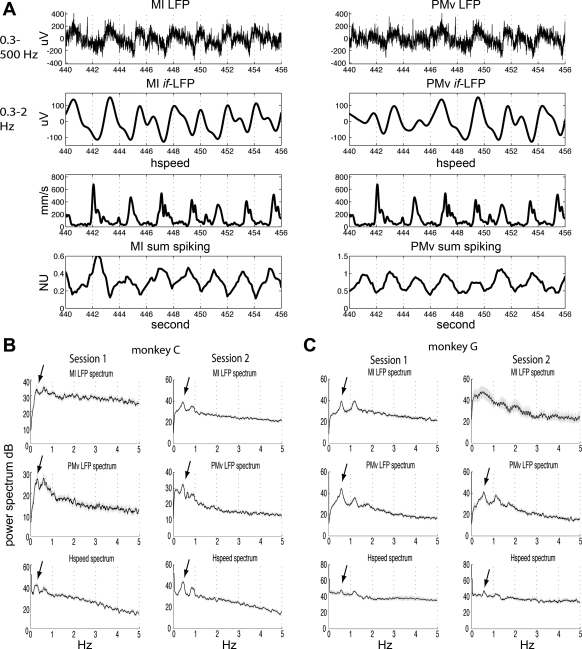
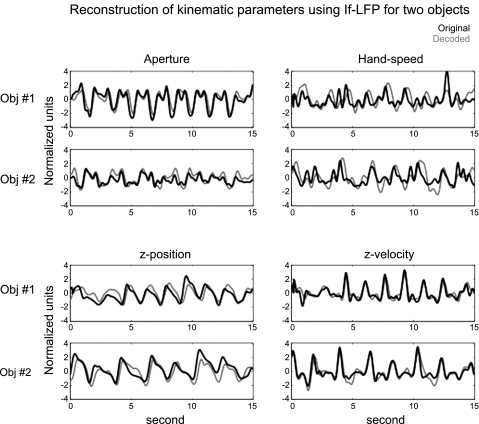
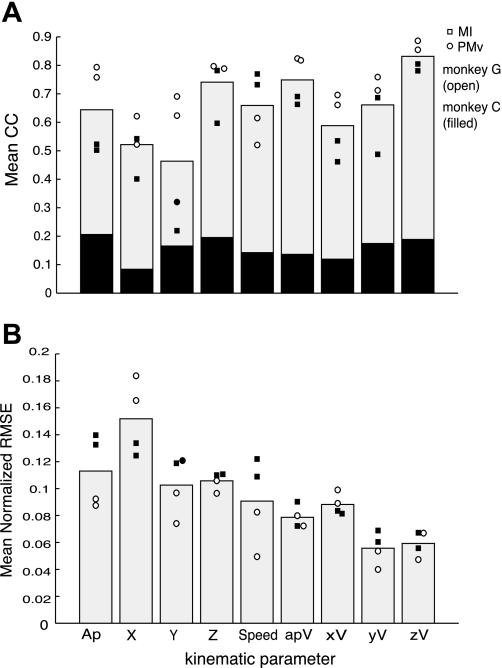
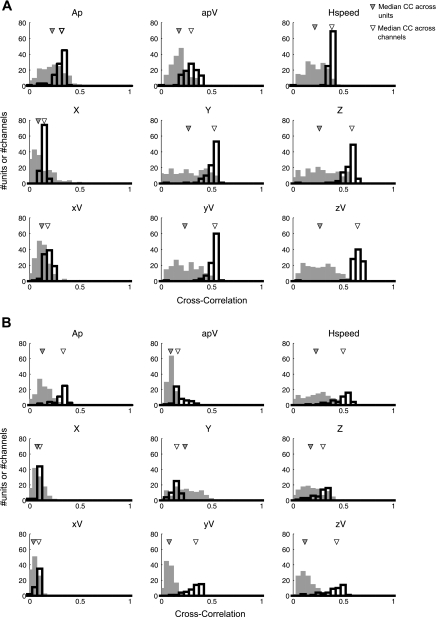
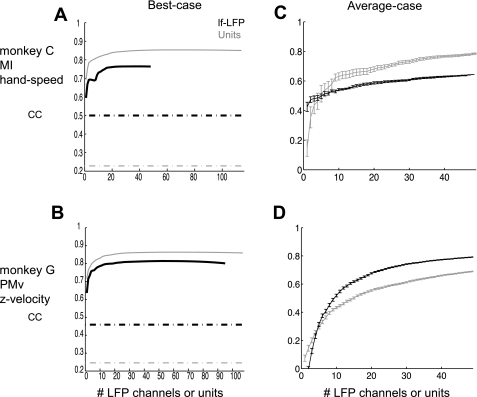
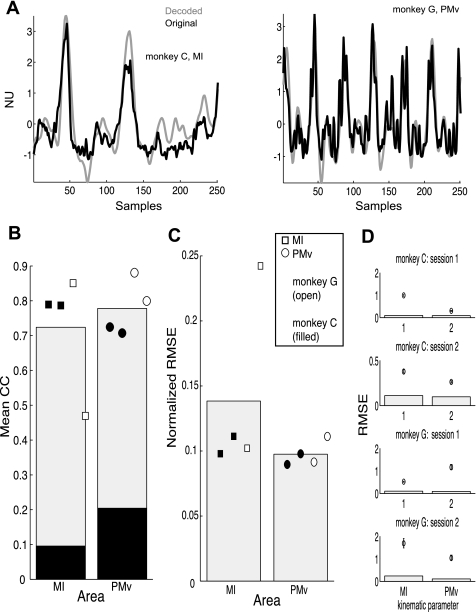
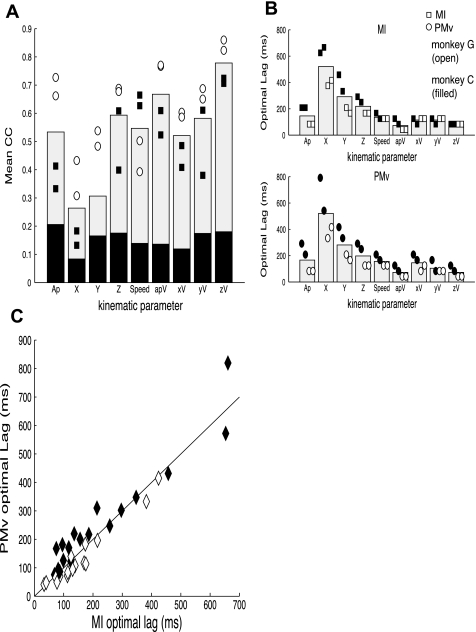
A prominent feature of motor cortex field potentials during movement is a distinctive low-frequency local field potential (lf-LFP) (<4 Hz), referred to as the movement event-related potential (mEP). The lf-LFP appears to be a global signal related to regional synaptic input, but its relationship to nearby output signaled by single unit spiking activity (SUA) or to movement remains to be established. Previous studies comparing information in primary motor cortex (MI) lf-LFPs and SUA in the context of planar reaching tasks concluded that lf-LFPs have more information than spikes about movement. However, the relative performance of these signals was based on a small number of simultaneously recorded channels and units, or for data averaged across sessions, which could miss information of larger-scale spiking populations. Here, we simultaneously recorded LFPs and SUA from two 96-microelectrode arrays implanted in two major motor cortical areas, MI and ventral premotor (PMv), while monkeys freely reached for and grasped objects swinging in front of them. We compared arm end point and grip aperture kinematics' decoding accuracy for lf-LFP and SUA ensembles. The results show that lf-LFPs provide enough information to reconstruct kinematics in both areas with little difference in decoding performance between MI and PMv. Individual lf-LFP channels often provided more accurate decoding of single kinematic variables than any one single unit. However, the decoding performance of the best single unit among the large population usually exceeded that of the best single lf-LFP channel. Furthermore, ensembles of SUA outperformed the pool of lf-LFP channels, in disagreement with the previously reported superiority of lf-LFP decoding. Decoding results suggest that information in lf-LFPs recorded from intracortical arrays may allow the reconstruction of reach and grasp for real-time neuroprosthetic applications, thus potentially supplementing the ability to decode these same features from spiking populations.
Figures
Comment in
-
Role of local field potentials in encoding hand movement kinematics.J Neurophysiol. 2011 Oct;106(4):1601-3. doi: 10.1152/jn.00269.2011. Epub 2011 May 25. J Neurophysiol. 2011. PMID: 21613587
References
-
- Andersen RA, Musallam S, Pesaran B. Selecting the signals for a brain-machine interface. Curr Opin Neurobiol 14: 720–726, 2004 - PubMed
-
- Artemiadis P, Shakhnarovich G, Vargas-Irwin C, Black MJ, Donoghue JP. Decoding grasp aperture from motor-cortical population activity. The 3rd International IEEE EMBS Conference on Neural Engineering, pp. 518–521
-
- Asher I, Stark E, Abeles M, Prut Y. Comparison of direction and object selectivity of local field potentials and single units in macaque posterior parietal cortex during prehension. J Neurophysiol 97: 3684–3695, 2007 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources