

Quasistatic Modeling of Concentric Tube Robots with External Loads
- PMID: 21278853
- PMCID: PMC3028209
- DOI: 10.1109/IROS.2010.5651240
Quasistatic Modeling of Concentric Tube Robots with External Loads
Abstract
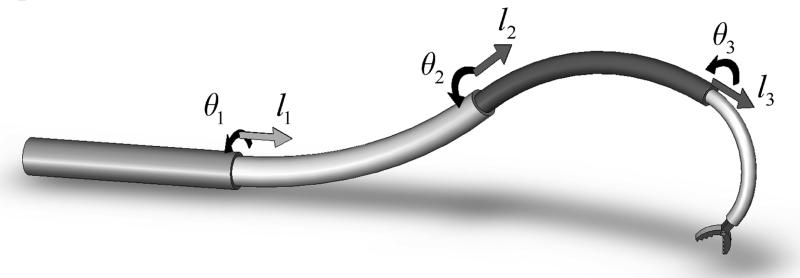
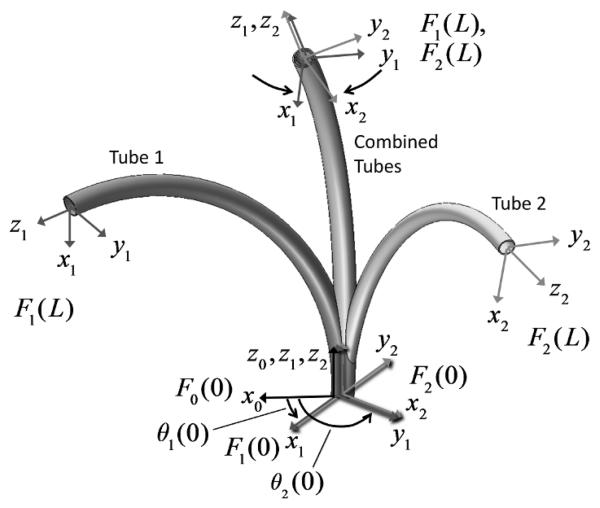
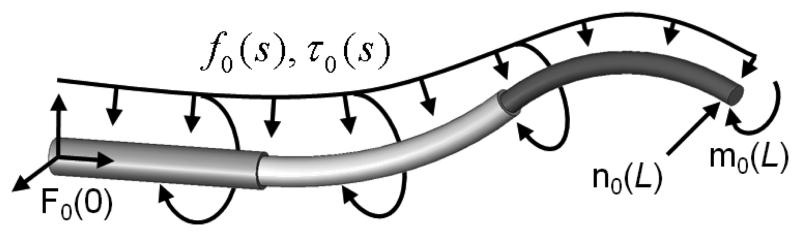
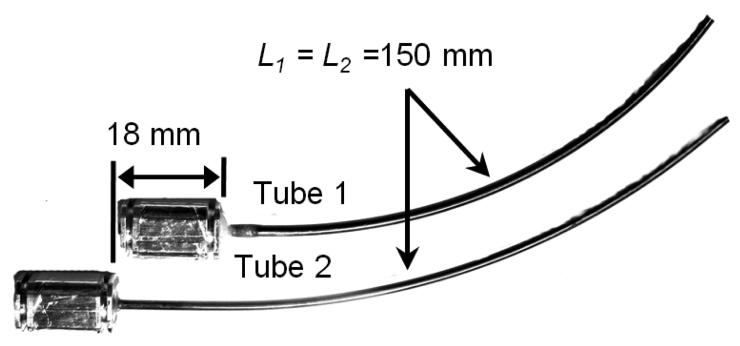
Concentric tube robots are a subset of continuum robots constructed by combining pre-curved elastic tubes. As the tubes are rotated and translated with respect to each other, their curvatures interact elastically, enabling control of the robot's tip configuration as well as the curvature along its length. This technology is projected to be useful in many types of minimally invasive medical procedures. Because these robots are flexible by design, they deflect considerably when applying forces to the external environment. Thus, in contrast to rigid-link robots, their kinematic and static force models are coupled. This paper derives a multi-tube quasistatic model that relates tube rotations and translations together with externally applied loads to robot shape and tip configuration. The model can be applied in robot design, procedure planning as well as control. For validation, the multi-tube model is compared experimentally to a computationally-efficient single-tube approximate model.
Figures
References
-
- Camarillo D, Milne C, Carlson C, Zinn M, Salisbury JK. Mechanics Modeling of Tendon-Driven Continuum Manipulators. IEEE Trans. Robotics. 2008 Dec.24(6):1262–1273.
-
- Meeker DC, Maslen EH, Ritter RC, Creighton FM. Optimal realization of arbitrary forces in a magnetic stereotaxis system. IEEE Trans. on Magnetics. 1996 Mar;32(2):320–328.
-
- Madhanir A, Niemeyer G, Salisbury JK., Jr. The Black Falcon: A Teleoperated Surgical Instrument for Minimally Invasive Surgery; IEEE/RSJ Int. Conference on Intelligent Robots and Systems, Victoria, B.C.; Canada. 1998. pp. 936–944.
-
- Xu K, Simaan N. An Investigation of the Intrinsic Force Sensing Capabilities of Continuum Robots. IEEE Trans. Robotics. 2008;24(3):576–587.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials