

The functional significance of velocity storage and its dependence on gravity
- PMID: 21293850
- PMCID: PMC3653597
- DOI: 10.1007/s00221-011-2568-4
The functional significance of velocity storage and its dependence on gravity
Abstract
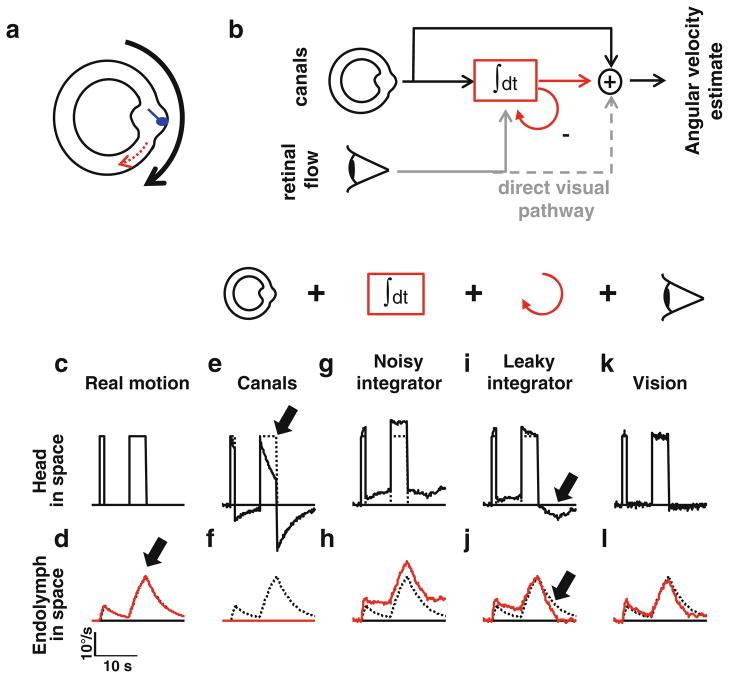
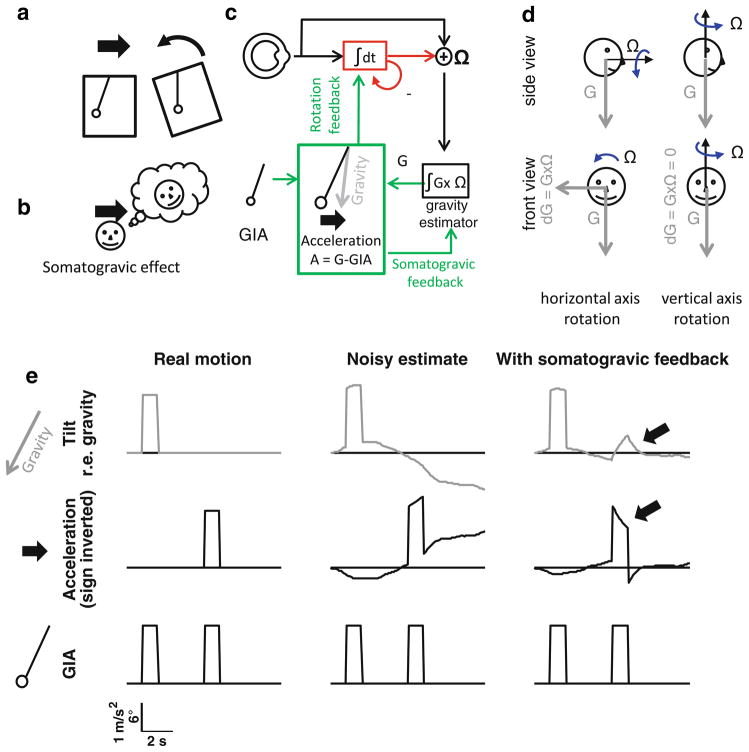
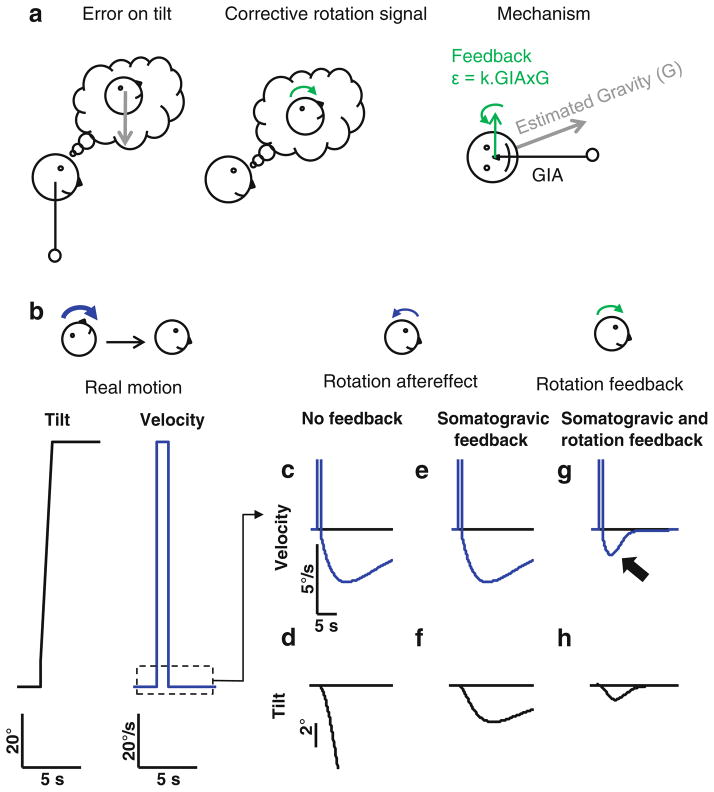
Research in the vestibular field has revealed the existence of a central process, called 'velocity storage', that is activated by both visual and vestibular rotation cues and is modified by gravity, but whose functional relevance during natural motion has often been questioned. In this review, we explore spatial orientation in the context of a Bayesian model of vestibular information processing. In this framework, deficiencies/ambiguities in the peripheral vestibular sensors are compensated for by central processing to more accurately estimate rotation velocity, orientation relative to gravity, and inertial motion. First, an inverse model of semicircular canal dynamics is used to reconstruct rotation velocity by integrating canal signals over time. However, its low-frequency bandwidth is limited to avoid accumulation of noise in the integrator. A second internal model uses this reconstructed rotation velocity to compute an internal estimate of tilt and inertial acceleration. The bandwidth of this second internal model is also restricted at low frequencies to avoid noise accumulation and drift of the tilt/translation estimator over time. As a result, low-frequency translation can be erroneously misinterpreted as tilt. The time constants of these two integrators (internal models) can be conceptualized as two Bayesian priors of zero rotation velocity and zero linear acceleration, respectively. The model replicates empirical observations like 'velocity storage' and 'frequency segregation' and explains spatial orientation (e.g., 'somatogravic') illusions. Importantly, the functional significance of this network, including velocity storage, is found during short-lasting, natural head movements, rather than at low frequencies with which it has been traditionally studied.
Figures



References
-
- Angelaki DE. Three-dimensional organization of otolith-ocular reflexes in rhesus monkeys. III. Responses to translation. J Neurophysiol. 1998;80:680–695. - PubMed
-
- Angelaki DE, Cullen KE. Vestibular system: the many facets of a multimodal sense. Annu Rev Neurosci. 2008;31:125–150. - PubMed
-
- Angelaki DE, Hess BJ. Inertial representation of angular motion in the vestibular system of rhesus monkeys. I. Vestibuloocular reflex. J Neurophysiol. 1994;71:1222–1249. - PubMed
-
- Angelaki DE, Hess BJ. Inertial representation of angular motion in the vestibular system of rhesus monkeys. II. Otolith-controlled transformation that depends on an intact cerebellar nodulus. J Neurophysiol. 1995a;73:1729–1751. - PubMed
-
- Angelaki DE, Hess BJ. Lesion of the nodulus and ventral uvula abolish steady-state off-vertical axis otolith response. J Neurophysiol. 1995b;73:1716–1720. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
