

Muscle redundancy does not imply robustness to muscle dysfunction
- PMID: 21420091
- PMCID: PMC3090003
- DOI: 10.1016/j.jbiomech.2011.02.014
Muscle redundancy does not imply robustness to muscle dysfunction
Abstract
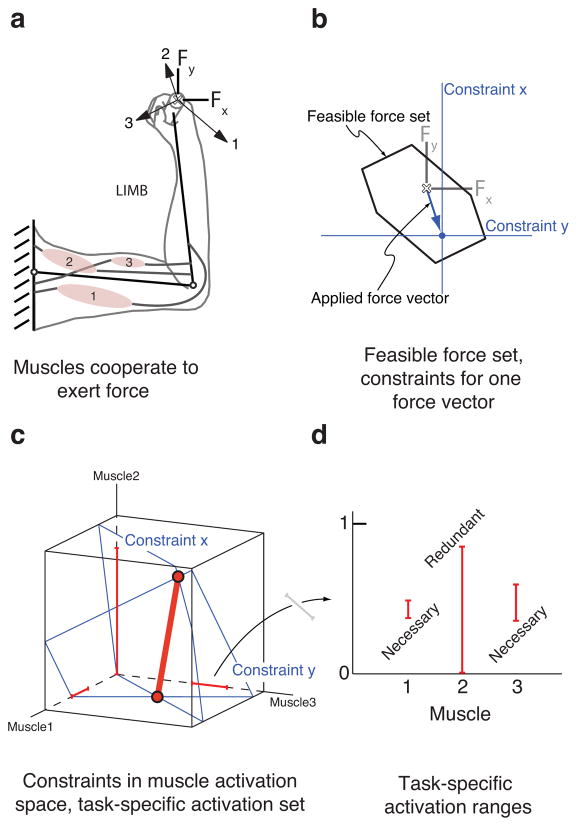
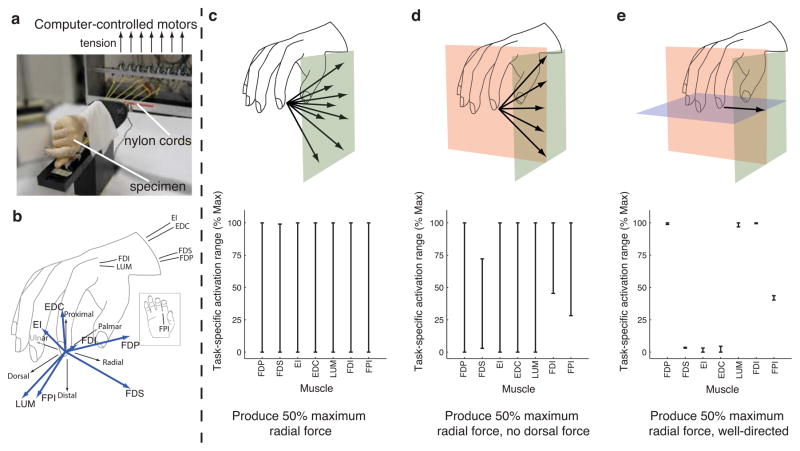
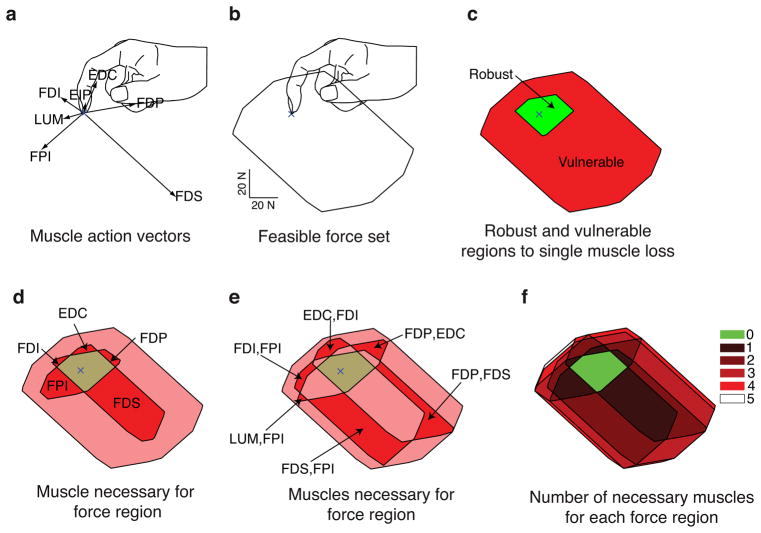
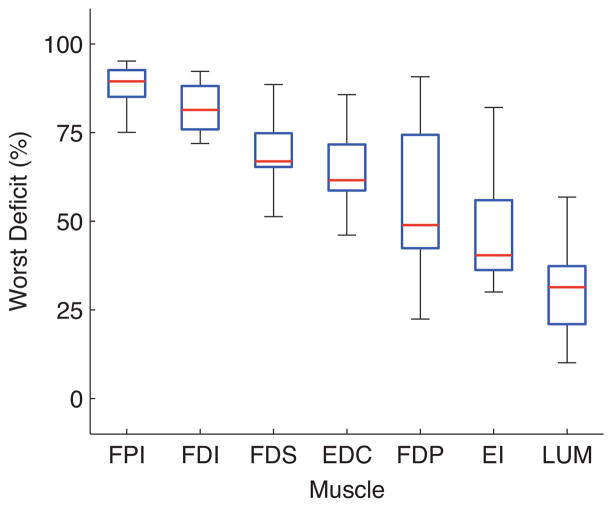
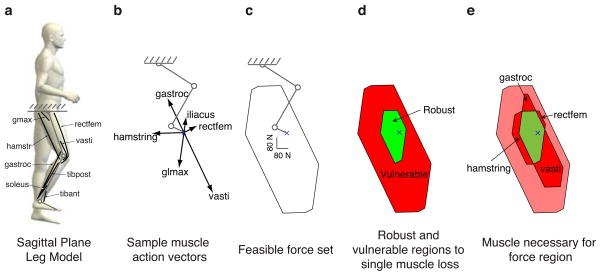
It is well-known that muscle redundancy grants the CNS numerous options to perform a task. Does muscle redundancy, however, allow sufficient robustness to compensate for loss or dysfunction of even a single muscle? Are all muscles equally redundant? We combined experimental and computational approaches to establish the limits of motor robustness for static force production. In computer-controlled cadaveric index fingers, we find that only a small subset (<5%) of feasible forces is robust to loss of any one muscle. Importantly, the loss of certain muscles compromises force production significantly more than others. Further computational modeling of a multi-joint, multi-muscle leg demonstrates that this severe lack of robustness generalizes to whole limbs. These results provide a biomechanical basis to begin to explain why redundant motor systems can be vulnerable to even mild neuromuscular pathology.
Copyright © 2011 Elsevier Ltd. All rights reserved.
Conflict of interest statement
We the authors have no real or perceived financial and personal relationships with other people or organizations that could inappropriately influence (bias) our work. Examples of potential conflicts of interest include employment, consultancies, stock ownership, honoraria, paid expert testimony, patent applications/registrations, and grants or other funding.
Figures
References
-
- Agee J, Relton McCarroll H, Hollister A. The anatomy of the flexor digitorum superficialis relevant to tendon transfers. The Journal of Hand Surgery: Journal of the British Society for Surgery of the Hand. 1991;16(1):68–69. - PubMed
-
- Avis D, Fukuda K. A pivoting algorithm for convex hulls and vertex enumeration of arrangements and polyhedra. Discrete & Computational Geometry. 1992;8(3):295–313.
-
- Bernstein NA. The co-ordination and regulation of movements. Pergamon Press; Oxford: 1967.
-
- Buchanan TS, Almdale DPJ, Lewis JL, Rymer WZ. Characteristics of synergic relations during isometric contractions of human elbow muscles. Journal of Neurophysiology. 1986;56(5):1225–1241. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
