

Stabilization of the total force in multi-finger pressing tasks studied with the 'inverse piano' technique
- PMID: 21450360
- PMCID: PMC3095732
- DOI: 10.1016/j.humov.2010.08.021
Stabilization of the total force in multi-finger pressing tasks studied with the 'inverse piano' technique
Abstract
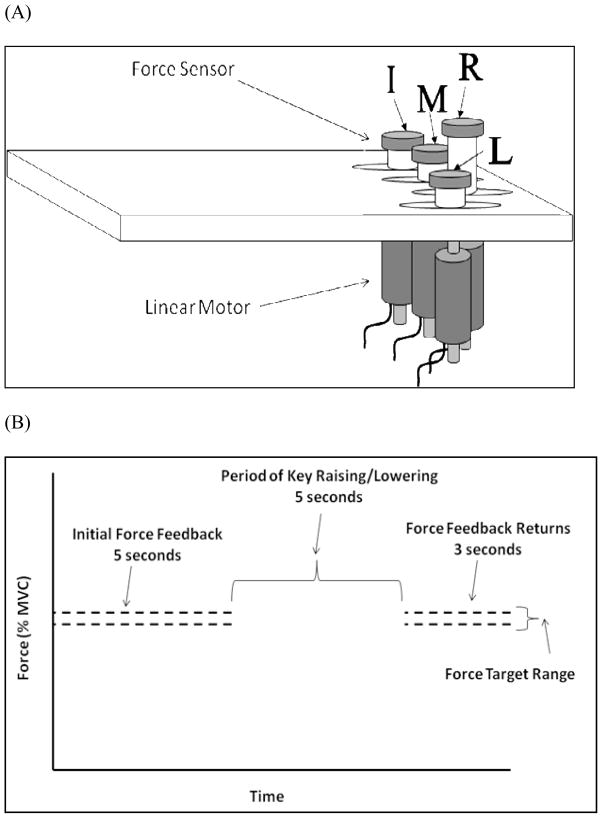
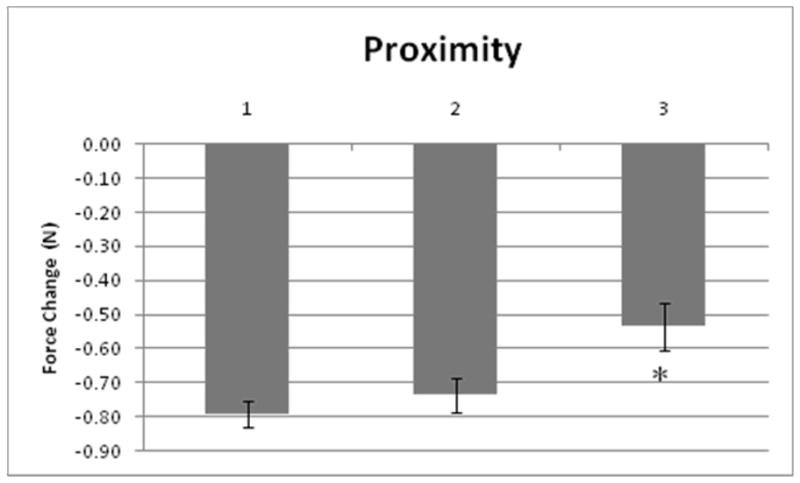
When one finger changes its force, other fingers of the hand can show unintended force changes in the same direction (enslaving) and in the opposite direction (error compensation). We tested a hypothesis that externally imposed changes in finger force predominantly lead to error compensation effects in other fingers thus stabilizing the total force. A novel device, the "inverse piano", was used to impose controlled displacements to one of the fingers over different magnitudes and at different rates. Subjects (n=10) pressed with four fingers at a constant force level and then one of the fingers was unexpectedly raised. The subjects were instructed not to interfere with possible changes in the finger forces. Raising a finger caused an increase in its force and a drop in the force of the other three fingers. Overall, total force showed a small increase. Larger force drops were seen in neighbors of the raised finger (proximity effect). The results showed that multi-finger force stabilizing synergies dominate during involuntary reactions to externally imposed finger force changes. Within the referent configuration hypothesis, the data suggest that the instruction "not to interfere" leads to adjustments of the referent coordinates of all the individual fingers.
Published by Elsevier B.V.
Figures

Similar articles
-
Multi-finger interaction during involuntary and voluntary single finger force changes.Exp Brain Res. 2011 Feb;208(3):423-35. doi: 10.1007/s00221-010-2492-z. Epub 2010 Nov 23. Exp Brain Res. 2011. PMID: 21104236 Free PMC article.
-
Do synergies improve accuracy? A study of speed-accuracy trade-offs during finger force production.Motor Control. 2008 Apr;12(2):151-72. doi: 10.1123/mcj.12.2.151. Motor Control. 2008. PMID: 18483449 Free PMC article.
-
Finger interaction in a three-dimensional pressing task.Exp Brain Res. 2010 May;203(1):101-18. doi: 10.1007/s00221-010-2213-7. Epub 2010 Mar 25. Exp Brain Res. 2010. PMID: 20336281 Free PMC article.
-
The effect of enslaving on perception of finger forces.Exp Brain Res. 2006 Jul;172(3):301-9. doi: 10.1007/s00221-005-0332-3. Epub 2006 Jan 18. Exp Brain Res. 2006. PMID: 16418845
-
Prehension synergies.Exerc Sport Sci Rev. 2004 Apr;32(2):75-80. doi: 10.1097/00003677-200404000-00007. Exerc Sport Sci Rev. 2004. PMID: 15064652 Free PMC article. Review.
Cited by
-
Stability of steady hand force production explored across spaces and methods of analysis.Exp Brain Res. 2018 Jun;236(6):1545-1562. doi: 10.1007/s00221-018-5238-y. Epub 2018 Mar 22. Exp Brain Res. 2018. PMID: 29564506 Free PMC article.
-
Stability of hand force production. I. Hand level control variables and multifinger synergies.J Neurophysiol. 2017 Dec 1;118(6):3152-3164. doi: 10.1152/jn.00485.2017. Epub 2017 Sep 13. J Neurophysiol. 2017. PMID: 28904102 Free PMC article.
-
Error compensation in a redundant system during 'failure' of individual motor elements.Exp Brain Res. 2025 Jan 18;243(2):46. doi: 10.1007/s00221-024-06987-5. Exp Brain Res. 2025. PMID: 39825902
-
Quantitative analysis of multi-element synergy stabilizing performance: comparison of three methods with respect to their use in clinical studies.Exp Brain Res. 2019 Feb;237(2):453-465. doi: 10.1007/s00221-018-5436-7. Epub 2018 Nov 20. Exp Brain Res. 2019. PMID: 30460392 Free PMC article.
-
Multi-finger interaction during involuntary and voluntary single finger force changes.Exp Brain Res. 2011 Feb;208(3):423-35. doi: 10.1007/s00221-010-2492-z. Epub 2010 Nov 23. Exp Brain Res. 2011. PMID: 21104236 Free PMC article.
References
-
- Arimoto S, Tahara K, Yamaguchi M, Nguyen PTA, Han HY. Principles of superposition for controlling pinch motions by means of robot fingers with soft tips. Robotica. 2001;19:21–28.
-
- Bernstein NA. The co-ordination and regulation of movements. Pergamon Press; Oxford: 1967.
-
- Feldman AG. Functional tuning of the nervous system with control of movement or maintenance of a steady posture. II. Controllable parameters of the muscle. Biophysics. 1966;11:565–578.
-
- Feldman AG. Once more on the equilibrium-point hypothesis (λ-model) for motor control. Journal of Motor Behavior. 1986;18:17–54. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
