

Topsy-turvy locomotion: biomechanical specializations of the elbow in suspended quadrupeds reflect inverted gravitational constraints
- PMID: 21477151
- PMCID: PMC3162238
- DOI: 10.1111/j.1469-7580.2011.01379.x
Topsy-turvy locomotion: biomechanical specializations of the elbow in suspended quadrupeds reflect inverted gravitational constraints
Abstract
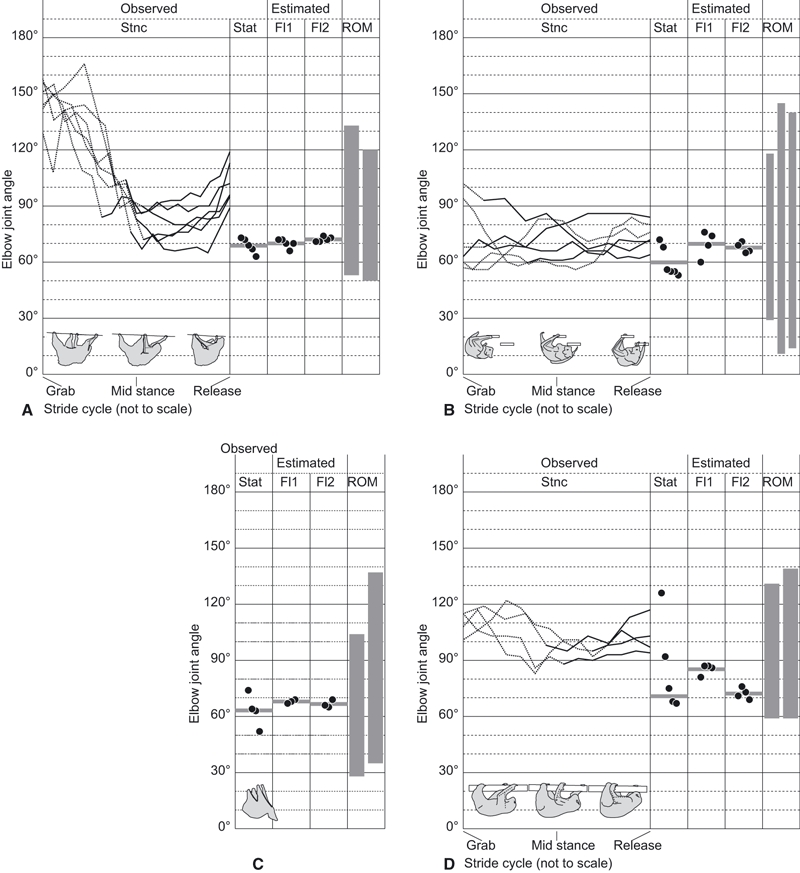
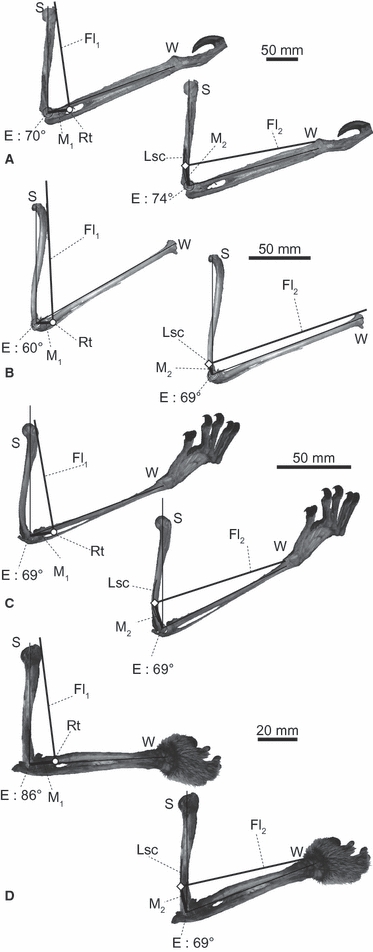
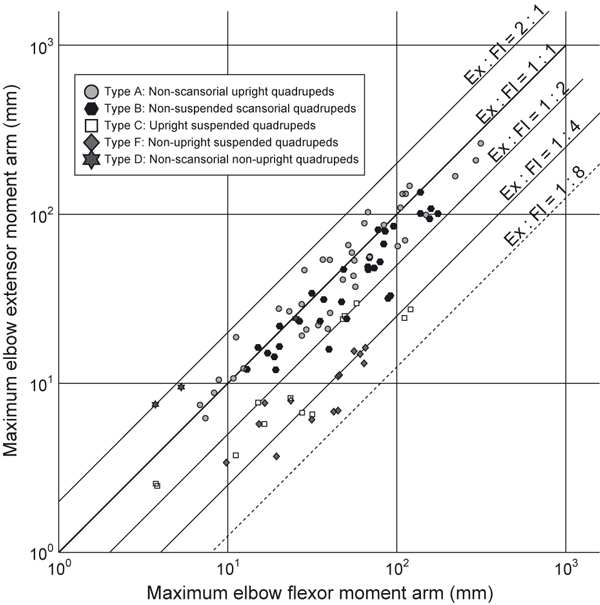
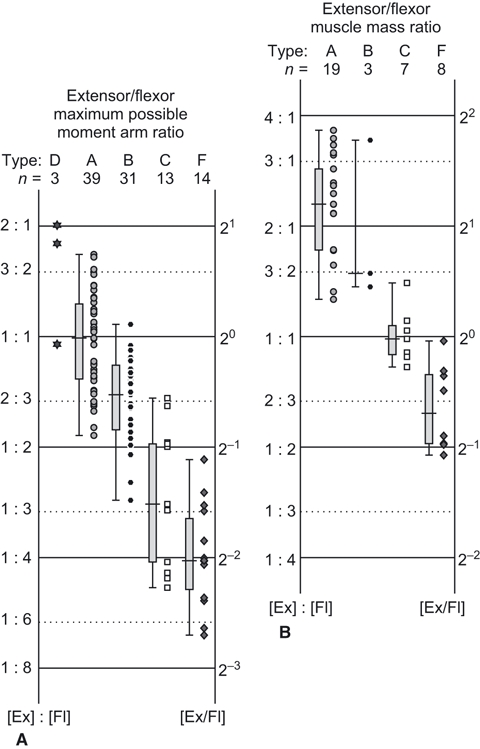
Some tetrapods hang upside down from tree branches when moving horizontally. The ability to walk in quadrupedal suspension has been acquired independently in at least 14 mammalian lineages. During the stance (supportive) phase of quadrupedal suspension, the elbow joint flexor muscles (not the extensors as in upright vertebrates moving overground) are expected to contract to maintain the flexed limb posture. Therefore muscular control in inverted, suspended quadrupeds may require changes of muscle control, and even morphologies, to conditions opposite to those in upright animals. However, the relationships between musculoskeletal morphologies and elbow joint postures during the stance phase in suspended quadrupeds have not been investigated. Our analysis comparing postures and skeletal morphologies in Choloepus (Pilosa), Pteropus (Chiroptera), Nycticebus (Primates) and Cynocephalus (Dermoptera) revealed that the elbow joints of these animals were kept at flexed angles of 70-100 ° during the stance phase of quadrupedal suspension. At these joint angles the moment arms of the elbow joint flexors were roughly maximized, optimizing that component of antigravity support. Our additional measurements from various mammalian species show that suspended quadrupeds have relatively small extensor/flexor ratios in both muscle masses and maximum moment arms. Thus, in contrast to the pattern in normal terrestrial quadrupeds, suspended quadrupeds emphasize flexor over extensor muscles for body support. This condition has evolved independently multiple times, attendant with a loss or reduction of the ability to move in normal upright postures.
© 2011 The Authors. Journal of Anatomy © 2011 Anatomical Society of Great Britain and Ireland.
Figures
Similar articles
-
Elbow joint adductor moment arm as an indicator of forelimb posture in extinct quadrupedal tetrapods.Proc Biol Sci. 2012 Jul 7;279(1738):2561-70. doi: 10.1098/rspb.2012.0190. Epub 2012 Feb 22. Proc Biol Sci. 2012. PMID: 22357261 Free PMC article.
-
Musculoskeletal modelling of the Nile crocodile (Crocodylus niloticus) hindlimb: Effects of limb posture on leverage during terrestrial locomotion.J Anat. 2021 Aug;239(2):424-444. doi: 10.1111/joa.13431. Epub 2021 Mar 23. J Anat. 2021. PMID: 33754362 Free PMC article.
-
Forms of forward quadrupedal locomotion. I. A comparison of posture, hindlimb kinematics, and motor patterns for normal and crouched walking.J Neurophysiol. 1996 Oct;76(4):2316-26. doi: 10.1152/jn.1996.76.4.2316. J Neurophysiol. 1996. PMID: 8899606
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
-
Soft-tissue stabilizers of the elbow.J Shoulder Elbow Surg. 2005 Jan-Feb;14(1 Suppl S):179S-185S. doi: 10.1016/j.jse.2004.09.032. J Shoulder Elbow Surg. 2005. PMID: 15726079 Review.
Cited by
-
Myology of the pelvic limb of the brown-throated three-toed sloth (Bradypus variegatus).J Anat. 2022 Jun;240(6):1048-1074. doi: 10.1111/joa.13626. Epub 2022 Jan 17. J Anat. 2022. PMID: 35037260 Free PMC article.
-
Architectural properties of the musculoskeletal system in the shoulder of two callitrichid primate species derived from virtual dissection.Primates. 2021 Sep;62(5):827-843. doi: 10.1007/s10329-021-00917-7. Epub 2021 Jun 28. Primates. 2021. PMID: 34181123 Free PMC article.
-
Three-Dimensional Limb Kinematics in Brown-Throated Three-Toed Sloths (Bradypus variegatus) During Suspensory Quadrupedal Locomotion.J Exp Zool A Ecol Integr Physiol. 2025 Jun;343(5):564-577. doi: 10.1002/jez.2911. Epub 2025 Mar 3. J Exp Zool A Ecol Integr Physiol. 2025. PMID: 40033687 Free PMC article.
-
Elbow joint adductor moment arm as an indicator of forelimb posture in extinct quadrupedal tetrapods.Proc Biol Sci. 2012 Jul 7;279(1738):2561-70. doi: 10.1098/rspb.2012.0190. Epub 2012 Feb 22. Proc Biol Sci. 2012. PMID: 22357261 Free PMC article.
-
Musculoskeletal modelling of the Nile crocodile (Crocodylus niloticus) hindlimb: Effects of limb posture on leverage during terrestrial locomotion.J Anat. 2021 Aug;239(2):424-444. doi: 10.1111/joa.13431. Epub 2021 Mar 23. J Anat. 2021. PMID: 33754362 Free PMC article.
References
-
- Airapetyants AE, Fokin IM. Biology of European flying squirrel Pteromys volans L. (Rodentia: Pteromyidae) in the North-West of Russia. Russ J Theriol. 2003;2:105–113.
-
- Alexander RM. The gaits of bipedal and quadrupedal animals. Int J Rob Res. 1984;3:49–59.
-
- An KN, Takahashi K, Harrigan TP, et al. Determination of muscle orientations and moment arms. J Biomech Eng ASME. 1984;106:280–282. - PubMed
-
- Biewener AA. Scaling body support in mammals: limb posture and muscle mechanics. Science. 1989;245:45–48. - PubMed
Publication types
MeSH terms
Grants and funding
- BB/C516844/1/BB_/Biotechnology and Biological Sciences Research Council/United Kingdom
- BB ⁄ F001169 ⁄ 1/BB_/Biotechnology and Biological Sciences Research Council/United Kingdom
- BB/H002782/1/BB_/Biotechnology and Biological Sciences Research Council/United Kingdom
- BB ⁄ H002782 ⁄ 1/BB_/Biotechnology and Biological Sciences Research Council/United Kingdom
- BB ⁄ C516844 ⁄ 1/BB_/Biotechnology and Biological Sciences Research Council/United Kingdom
LinkOut - more resources
Full Text Sources
