

Effect of skin hydration on the dynamics of fingertip gripping contact
- PMID: 21490002
- PMCID: PMC3177614
- DOI: 10.1098/rsif.2011.0086
Effect of skin hydration on the dynamics of fingertip gripping contact
Abstract
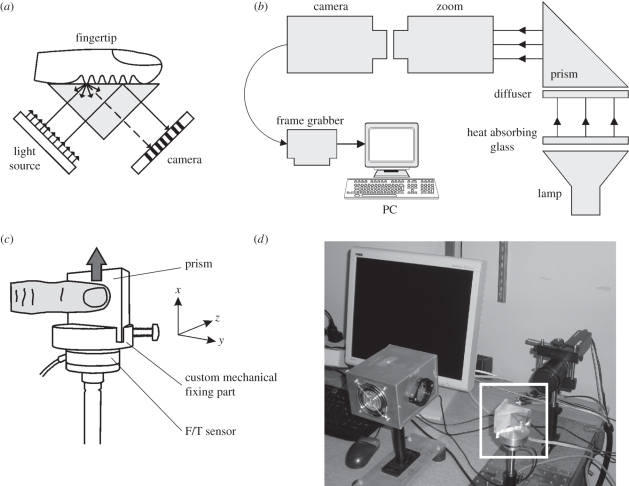
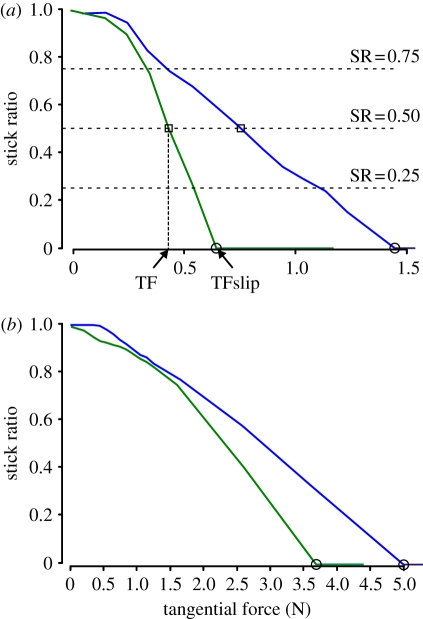
The dynamics of fingertip contact manifest themselves in the complex skin movements observed during the transition from a stuck state to a fully developed slip. While investigating this transition, we found that it depended on skin hydration. To quantify this dependency, we asked subjects to slide their index fingertip on a glass surface while keeping the normal component of the interaction force constant with the help of visual feedback. Skin deformation inside the contact region was imaged with an optical apparatus that allowed us to quantify the relative sizes of the slipping and sticking regions. The ratio of the stuck skin area to the total contact area decreased linearly from 1 to 0 when the tangential force component increased from 0 to a maximum. The slope of this relationship was inversely correlated to the normal force component. The skin hydration level dramatically affected the dynamics of the contact encapsulated in the course of evolution from sticking to slipping. The specific effect was to reduce the tendency of a contact to slip, regardless of the variations of the coefficient of friction. Since grips were more unstable under dry skin conditions, our results suggest that the nervous system responds to dry skin by exaggerated grip forces that cannot be simply explained by a change in the coefficient of friction.
Figures






References
-
- Johansson R. S., Flanagan J. R. 2009. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci. 10, 345–35910.1038/nrn2621 (doi:10.1038/nrn2621) - DOI - DOI - PubMed
-
- Johansson R. S., Vallbo A. B. 1983. Tactile sensory coding in the glabrous skin of the human hand. Trends Neurosci. 6, 27–3210.1016/0166-2236(83)90011-5 (doi:10.1016/0166-2236(83)90011-5) - DOI - DOI
-
- Johansson R. S., Westling G. 1984. Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp. Brain Res. 56, 550–56410.1007/BF00237997 (doi:10.1007/BF00237997) - DOI - DOI - PubMed
-
- Johnson K. O. 2001. The roles and functions of cutaneous mechanoreceptors. Curr. Opin. Neurobiol. 11, 455–46110.1016/S0959-4388(00)00234-8 (doi:10.1016/S0959-4388(00)00234-8) - DOI - DOI - PubMed
-
- Srinivasan M. A., Whitehouse J. M., LaMotte R. H. 1990. Tactile detection of slip: surface microgeometry and peripheral neural codes. J. Neurophysiol. 63, 1323–1332 - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
