Direct perception of action-scaled affordances: the shrinking gap problem
- PMID: 21500936
- PMCID: PMC3140555
- DOI: 10.1037/a0023510
Direct perception of action-scaled affordances: the shrinking gap problem
Abstract
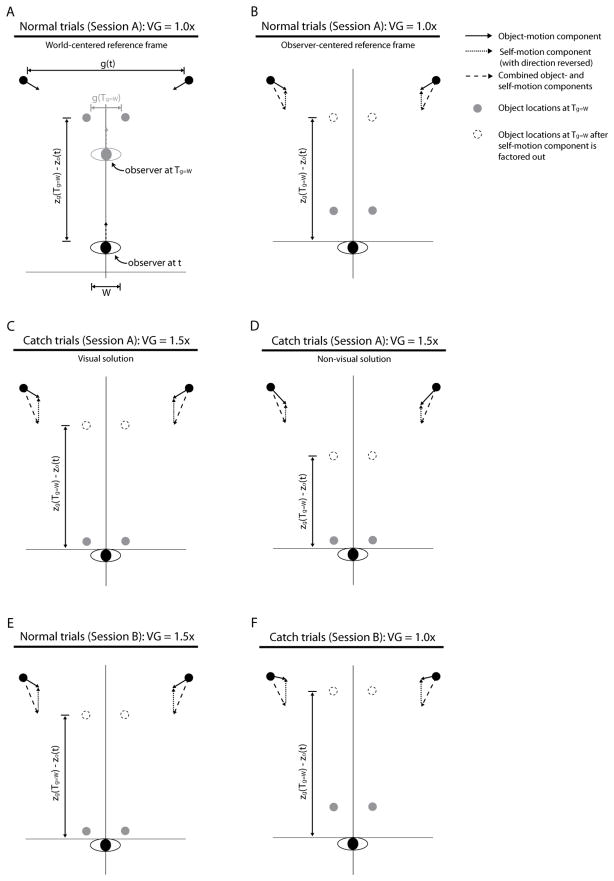
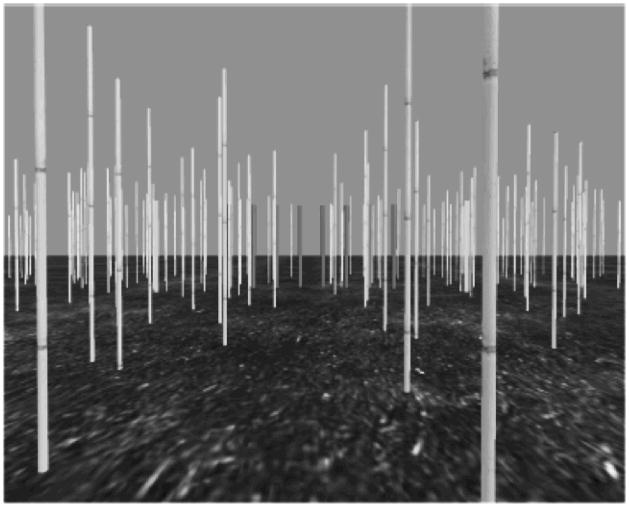
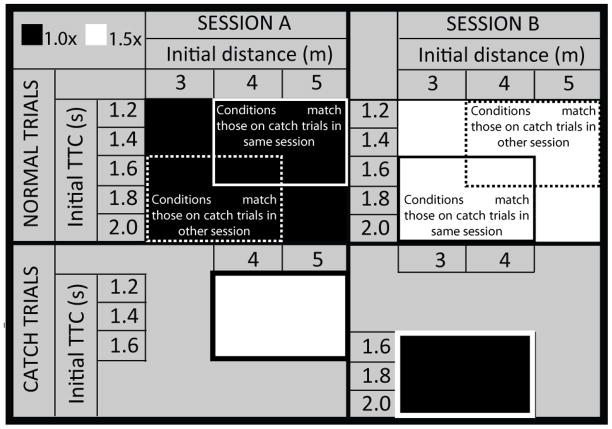
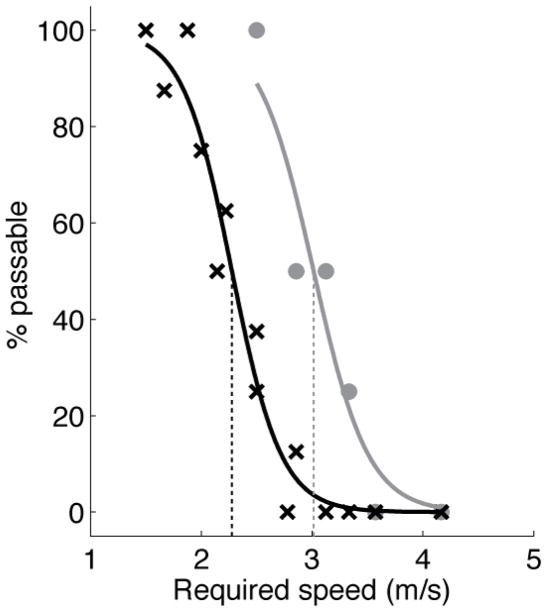
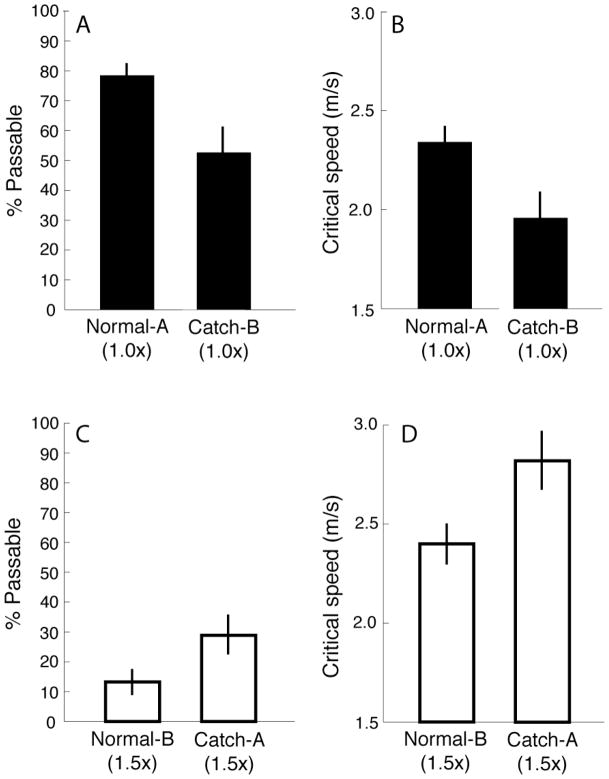
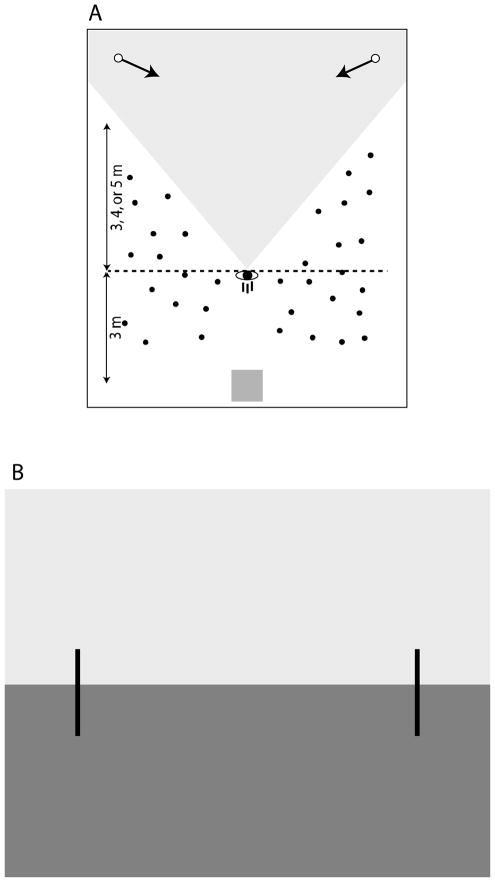
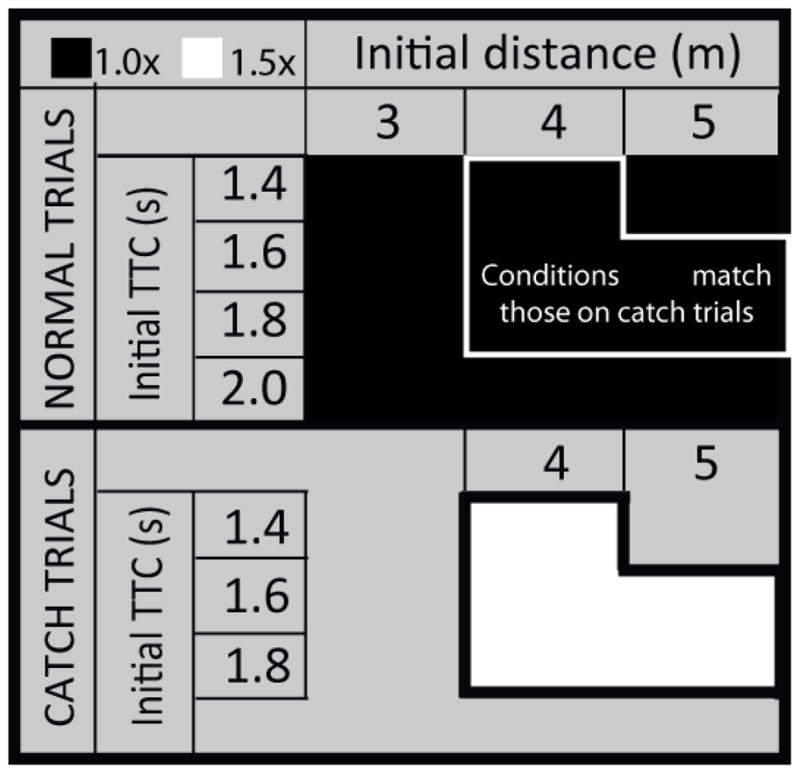
The aim of this study was to investigate the perception of possibilities for action (i.e., affordances) that depend on one's movement capabilities, and more specifically, the passability of a shrinking gap between converging obstacles. We introduce a new optical invariant that specifies in intrinsic units the minimum locomotor speed needed to safely pass through a shrinking gap. Detecting this information during self-motion requires recovering the component of the obstacles' local optical expansion attributable to obstacle motion, independent of self-motion. In principle, recovering the obstacle motion component could involve either visual or non-visual self-motion information. We investigated the visual and non-visual contributions in two experiments in which subjects walked through a virtual environment and made judgments about whether it was possible to pass through a shrinking gap. On a small percentage of trials, visual and non-visual self-motion information were independently manipulated by varying the speed with which subjects moved through the virtual environment. Comparisons of judgments on such catch trials with judgments on normal trials revealed both visual and non-visual contributions to the detection of information about minimum walking speed.
Figures



References
-
- Arzamarski R, Harrison SJ, Hajnal A, Michaels CF. Lateral ball interception: hand movements during linear ball trajectories. Experimental Brain Research. 2007;177(3):312–323. - PubMed
-
- Bastin J, Fajen BR, Montagne G. Controlling speed and direction during interception: an affordance-based approach. Experimental Brain Research. 2010;201(4):763–780. - PubMed
-
- Bootsma RJ, Craig CM. Global and local contributions to the optical specification of time to contact: observer sensitivity to composite tau. Perception. 2002;31(8):901–924. - PubMed
-
- Bootsma RJ, Peper L. Predictive visual information sources for the regulation of action with special emphasis on hitting and catching. In: Proteau LE, editor. Vision and motor control. Amsterdam: Elsevier; 1992.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous