

Fibre operating lengths of human lower limb muscles during walking
- PMID: 21502124
- PMCID: PMC3130447
- DOI: 10.1098/rstb.2010.0345
Fibre operating lengths of human lower limb muscles during walking
Abstract
Muscles actuate movement by generating forces. The forces generated by muscles are highly dependent on their fibre lengths, yet it is difficult to measure the lengths over which muscle fibres operate during movement. We combined experimental measurements of joint angles and muscle activation patterns during walking with a musculoskeletal model that captures the relationships between muscle fibre lengths, joint angles and muscle activations for muscles of the lower limb. We used this musculoskeletal model to produce a simulation of muscle-tendon dynamics during walking and calculated fibre operating lengths (i.e. the length of muscle fibres relative to their optimal fibre length) for 17 lower limb muscles. Our results indicate that when musculotendon compliance is low, the muscle fibre operating length is determined predominantly by the joint angles and muscle moment arms. If musculotendon compliance is high, muscle fibre operating length is more dependent on activation level and force-length-velocity effects. We found that muscles operate on multiple limbs of the force-length curve (i.e. ascending, plateau and descending limbs) during the gait cycle, but are active within a smaller portion of their total operating range.
Figures
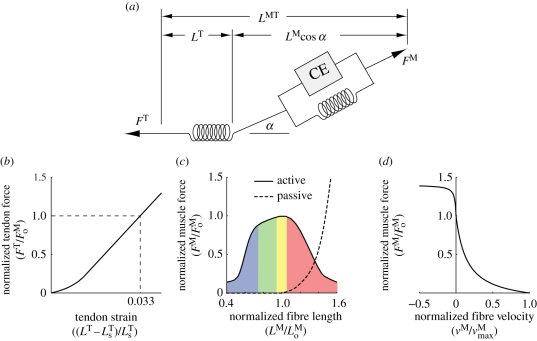
 ) was 0.033 when the muscle generated maximum isometric force (
) was 0.033 when the muscle generated maximum isometric force ( ). (c) Normalized active and passive force–length curves were scaled by maximum isometric force (
). (c) Normalized active and passive force–length curves were scaled by maximum isometric force ( ) and optimal fibre length (
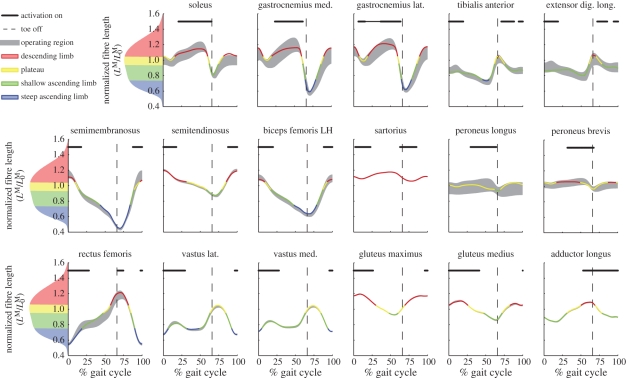
) and optimal fibre length ( ) derived from experimental measurements for each muscle. The regions of the active force–length curve were described as the steep ascending limb (blue), shallow ascending limb (green), plateau (yellow) and descending limb (red). (d) The force–velocity curve included concentric (vM > 0) and eccentric (vM < 0) regions and was scaled by maximum isometric force and
) derived from experimental measurements for each muscle. The regions of the active force–length curve were described as the steep ascending limb (blue), shallow ascending limb (green), plateau (yellow) and descending limb (red). (d) The force–velocity curve included concentric (vM > 0) and eccentric (vM < 0) regions and was scaled by maximum isometric force and  .
.
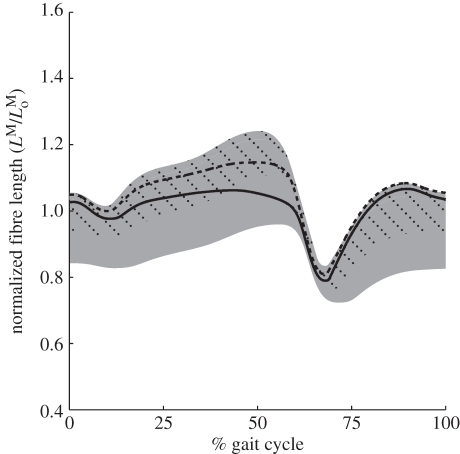
 ) have wider feasible operating ranges than muscles with relatively short tendons.
) have wider feasible operating ranges than muscles with relatively short tendons.
References
-
- Magid A., Law D. J. 1985. Myofibrils bear most of the resting tension in frog skeletal muscle. Science 230, 1280–1282 10.1126/science.4071053 (doi:10.1126/science.4071053) - DOI - PubMed
-
- Bahler A. S., Fales J. T., Zierler K. L. 1968. The dynamic properties of mammalian skeletal muscle. J. Gen. Physiol. 51, 369–384 10.1085/jgp.51.3.369 (doi:10.1085/jgp.51.3.369) - DOI - PMC - PubMed
-
- Zajac F. E. 1989. Muscle and tendon: properties, models, scaling, and application to biomechanics and motor control. Crit. Rev. Biomed. Eng. 17, 359–411 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources