

Motor cortical prediction of EMG: evidence that a kinetic brain-machine interface may be robust across altered movement dynamics
- PMID: 21562185
- PMCID: PMC3154818
- DOI: 10.1152/jn.00553.2010
Motor cortical prediction of EMG: evidence that a kinetic brain-machine interface may be robust across altered movement dynamics
Abstract
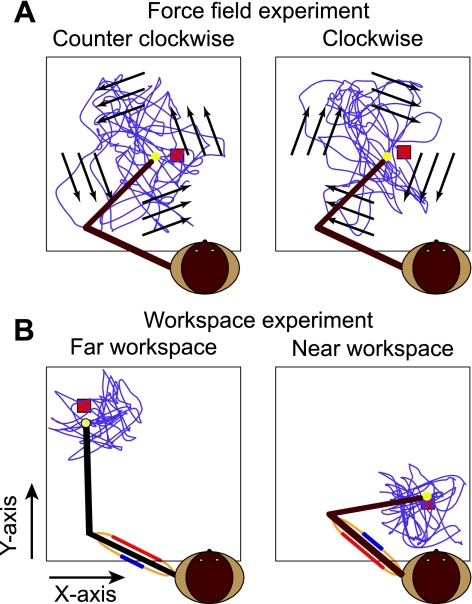
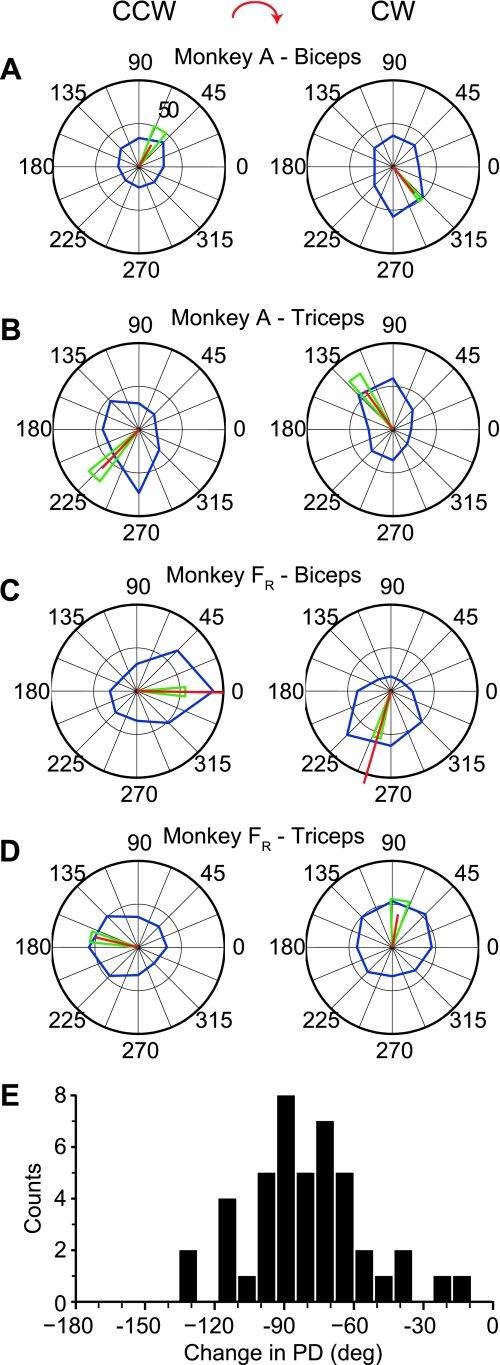
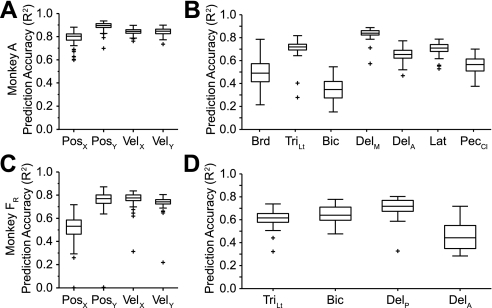
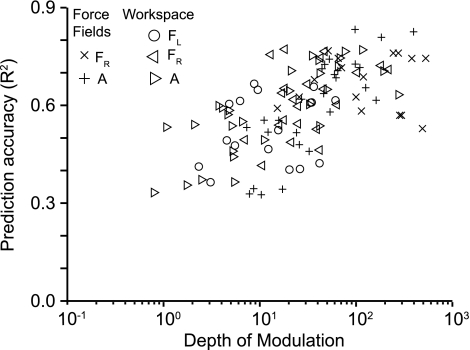
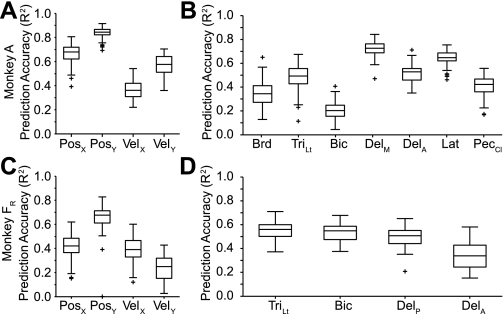
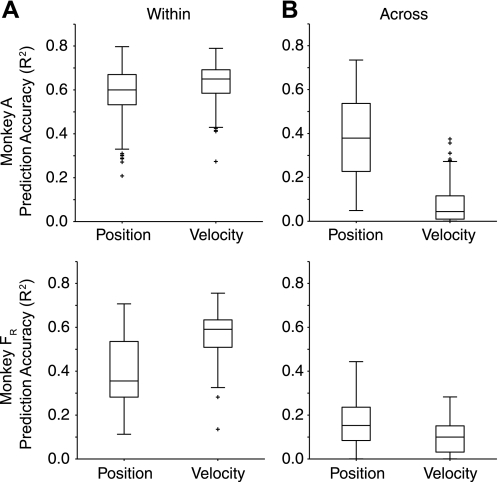
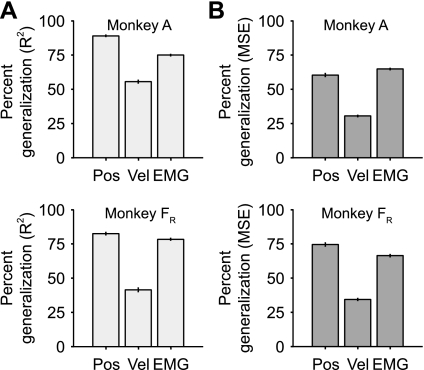
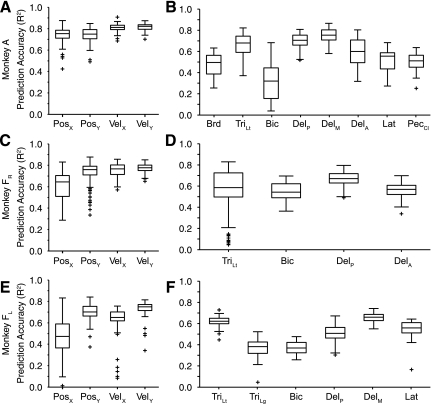
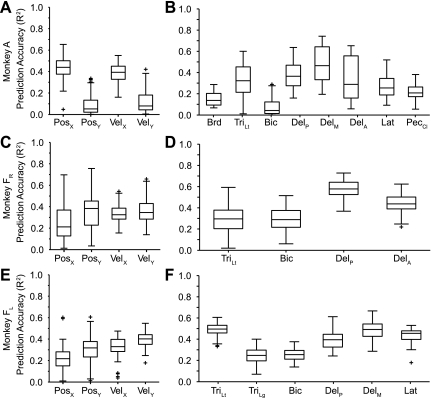
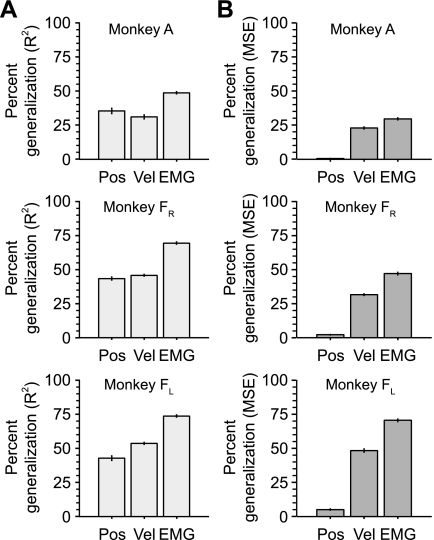
During typical movements, signals related to both the kinematics and kinetics of movement are mutually correlated, and each is correlated to some extent with the discharge of neurons in the primary motor cortex (M1). However, it is well known, if not always appreciated, that causality cannot be inferred from correlations. Although these mutual correlations persist, their nature changes with changing postural or dynamical conditions. Under changing conditions, only signals directly controlled by M1 can be expected to maintain a stable relationship with its discharge. If one were to rely on noncausal correlations for a brain-machine interface, its generalization across conditions would likely suffer. We examined this effect, using multielectrode recordings in M1 as input to linear decoders of both end point kinematics (position and velocity) and proximal limb myoelectric signals (EMG) during reaching. We tested these decoders across tasks that altered either the posture of the limb or the end point forces encountered during movement. Within any given task, the accuracy of the kinematic predictions tended to be somewhat better than the EMG predictions. However, when we used the decoders developed under one task condition to predict the signals recorded under different postural or dynamical conditions, only the EMG decoders consistently generalized well. Our results support the view that M1 discharge is more closely related to kinetic variables like EMG than it is to limb kinematics. These results suggest that brain-machine interface applications using M1 to control kinetic variables may prove to be more successful than the more standard kinematic approach.
Figures


References
-
- Alstermark B, Isa T, Pettersson LG, Sasaki S. The C3-C4 propriospinal system in the cat and monkey: a spinal pre-motoneuronal centre for voluntary motor control. Acta Physiol (Oxf) 189: 123–140, 2007 - PubMed
-
- Atkeson CG. Learning arm kinematics and dynamics. Annu Rev Neurosci 12: 157–183, 1989 - PubMed
-
- Brockwell AE, Rojas AL, Kass RE. Recursive bayesian decoding of motor cortical signals by particle filtering. J Neurophysiol 91: 1899–1907, 2004 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources