

Rational decision-making in inhibitory control
- PMID: 21647306
- PMCID: PMC3103997
- DOI: 10.3389/fnhum.2011.00048
Rational decision-making in inhibitory control
Abstract
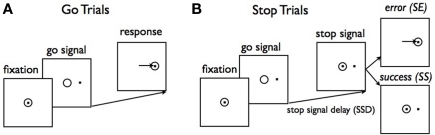
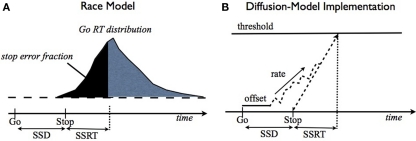
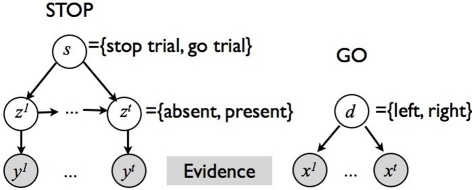
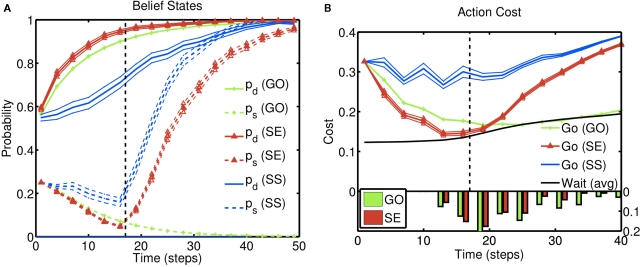
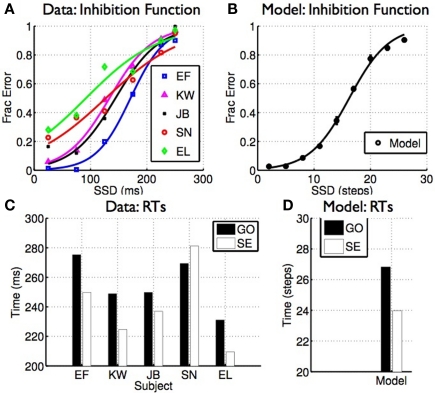
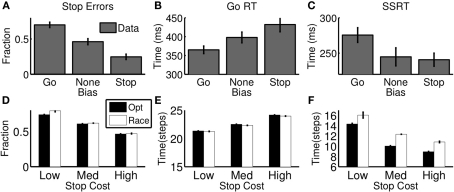
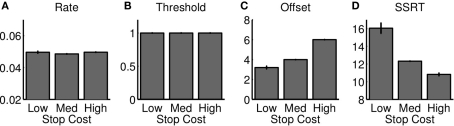
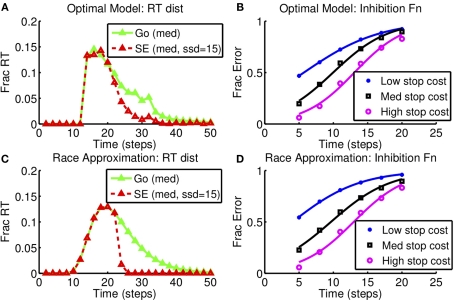
An important aspect of cognitive flexibility is inhibitory control, the ability to dynamically modify or cancel planned actions in response to changes in the sensory environment or task demands. We formulate a probabilistic, rational decision-making framework for inhibitory control in the stop signal paradigm. Our model posits that subjects maintain a Bayes-optimal, continually updated representation of sensory inputs, and repeatedly assess the relative value of stopping and going on a fine temporal scale, in order to make an optimal decision on when and whether to go on each trial. We further posit that they implement this continual evaluation with respect to a global objective function capturing the various reward and penalties associated with different behavioral outcomes, such as speed and accuracy, or the relative costs of stop errors and go errors. We demonstrate that our rational decision-making model naturally gives rise to basic behavioral characteristics consistently observed for this paradigm, as well as more subtle effects due to contextual factors such as reward contingencies or motivational factors. Furthermore, we show that the classical race model can be seen as a computationally simpler, perhaps neurally plausible, approximation to optimal decision-making. This conceptual link allows us to predict how the parameters of the race model, such as the stopping latency, should change with task parameters and individual experiences/ability.
Keywords: inhibitory control; optimal decision-making; speed-accuracy tradeoff; stop signal task.
Figures
References
-
- Alcock J., Sherman P. (1994). The utility of the proximate-ultimate dichotomy in ethology. Ethology 96, 58–62 10.1111/j.1439-0310.1994.tb00881.x - DOI
-
- Alderson R., Rapport M., Kofler M. (2007). Attention-deficit/hyperactivity disorder and behavioral inhibition: a meta-analytic review of the stop-signal paradigm. J. Abnorm. Child Psychol. 35, 745–758 - PubMed
-
- Amieva H., Lafont S., Auriacombe S., Le Carret N., Dartigues J. F., Orgogozo J. M., Fabrigoule C. (2002). Inhibitory breakdown and dementia of the Alzheimer type: a general phenomenon? J. Clin. Exp. Neuropsychol. 24, 503–516 - PubMed
LinkOut - more resources
Full Text Sources