

Interfacing with the computational brain
- PMID: 21659037
- PMCID: PMC3372096
- DOI: 10.1109/TNSRE.2011.2158586
Interfacing with the computational brain
Abstract
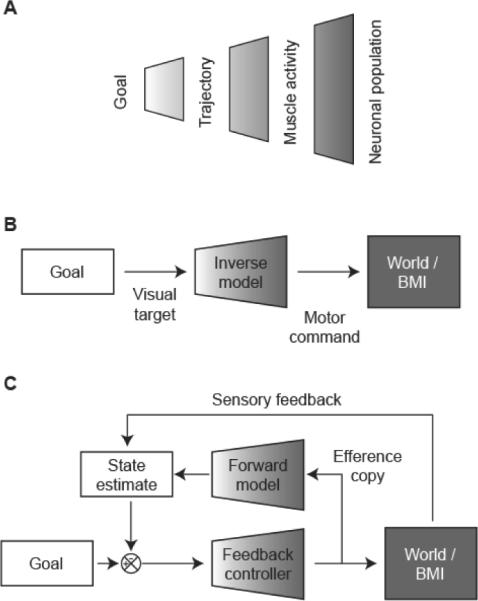
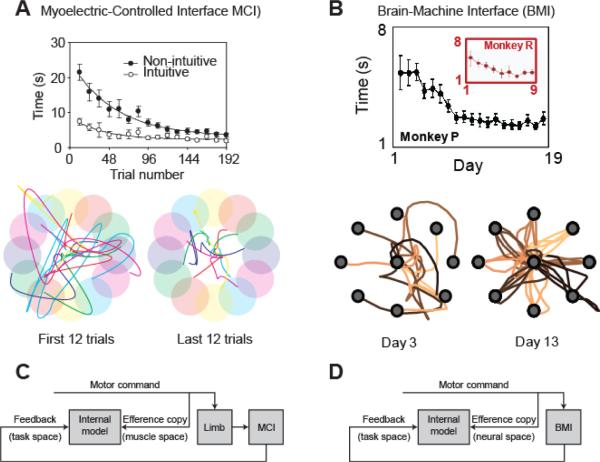
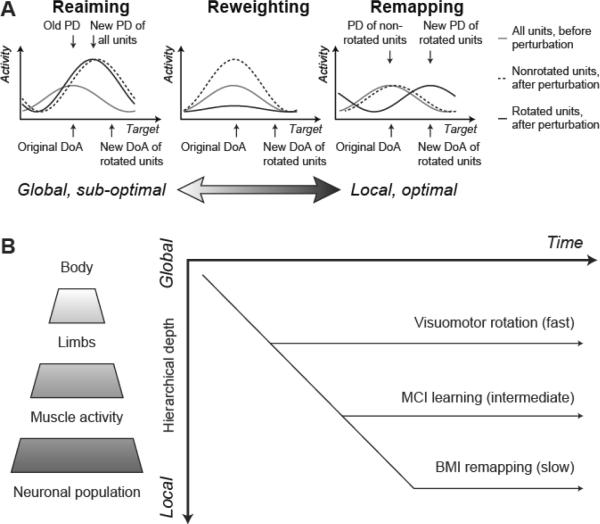
Neuroscience is just beginning to understand the neural computations that underlie our remarkable capacity to learn new motor tasks. Studies of natural movements have emphasized the importance of concepts such as dimensionality reduction within hierarchical levels of redundancy, optimization of behavior in the presence of sensorimotor noise and internal models for predictive control. These concepts also provide a framework for understanding the improvements in performance seen in myoelectric-controlled interface and brain-machine interface paradigms. Recent experiments reveal how volitional activity in the motor system combines with sensory feedback to shape neural representations and drives adaptation of behavior. By elucidating these mechanisms, a new generation of intelligent interfaces can be designed to exploit neural plasticity and restore function after neurological injury.
Figures
References
-
- Marr D. Vision. Freeman; San Francisco, CA: 1982. pp. 19–29.
-
- Kralik JD, Dimitrov DF, Krupa DJ, Katz DB, Cohen D, Nicolelis MA. Techniques for long-term multisite neuronal ensemble recordings in behaving animals. Methods. 2001 Oct.25(2):121–150. - PubMed
-
- Suner S, Fellows MR, Vargas-Irwin C, Nakata GK, Donoghue JP. Reliability of signals from a chronically implanted, silicon-based electrode array in non-human primate primary motor cortex. IEEE Trans. Neural Syst. Rehabil. Eng. 2005 Dec.13(4):524–541. - PubMed
-
- Jackson A, Fetz EE. Compact movable microwire array for long-term chronic unit recording in cerebral cortex of primates. J. Neurophysiol. 2007 Nov.98(5):3109–3118. - PubMed
