

How each movement changes the next: an experimental and theoretical study of fast adaptive priors in reaching
- PMID: 21734297
- PMCID: PMC3148097
- DOI: 10.1523/JNEUROSCI.6525-10.2011
How each movement changes the next: an experimental and theoretical study of fast adaptive priors in reaching
Abstract
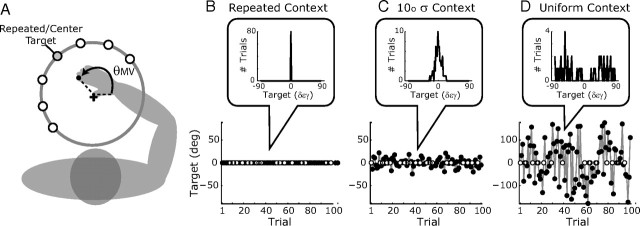
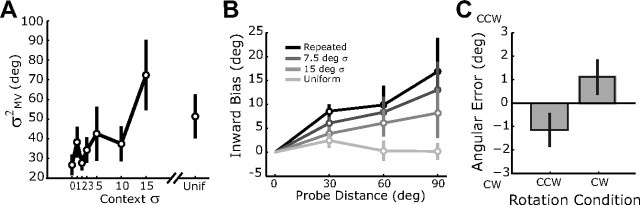
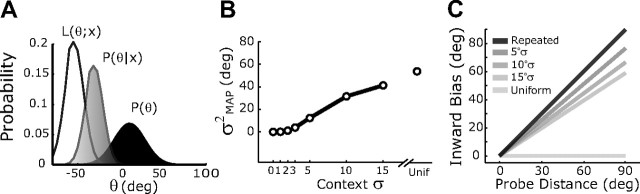
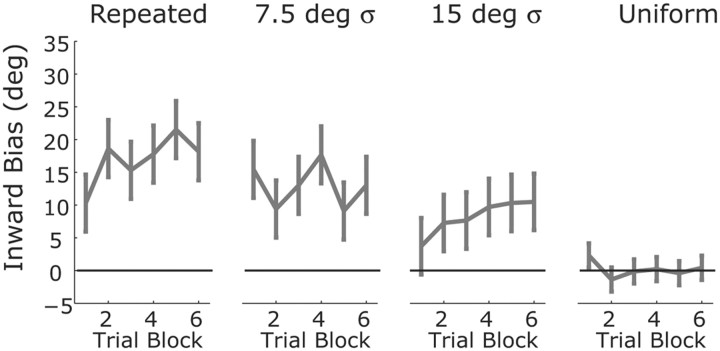
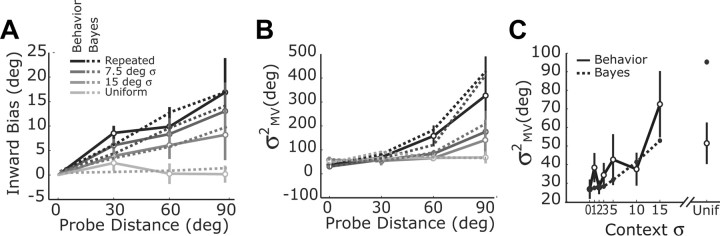
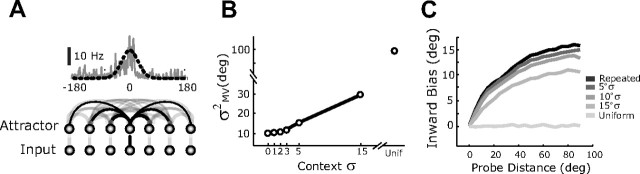
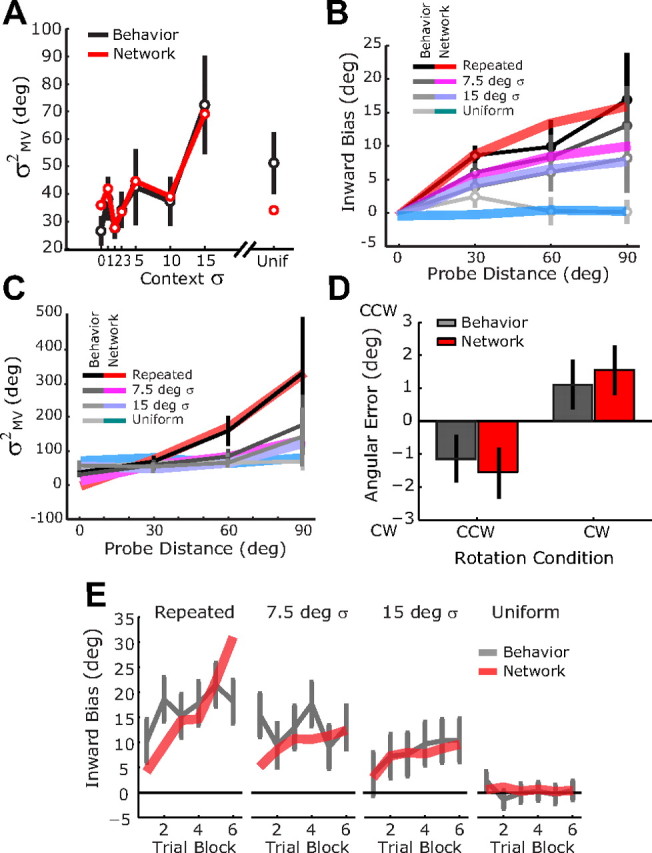
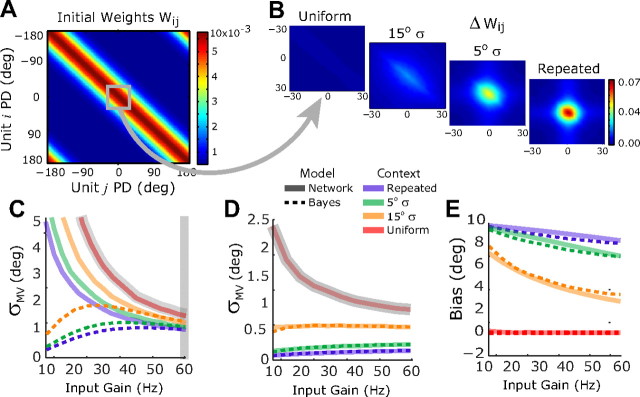
Most voluntary actions rely on neural circuits that map sensory cues onto appropriate motor responses. One might expect that for everyday movements, like reaching, this mapping would remain stable over time, at least in the absence of error feedback. Here we describe a simple and novel psychophysical phenomenon in which recent experience shapes the statistical properties of reaching, independent of any movement errors. Specifically, when recent movements are made to targets near a particular location subsequent movements to that location become less variable, but at the cost of increased bias for reaches to other targets. This process exhibits the variance-bias tradeoff that is a hallmark of Bayesian estimation. We provide evidence that this process reflects a fast, trial-by-trial learning of the prior distribution of targets. We also show that these results may reflect an emergent property of associative learning in neural circuits. We demonstrate that adding Hebbian (associative) learning to a model network for reach planning leads to a continuous modification of network connections that biases network dynamics toward activity patterns associated with recent inputs. This learning process quantitatively captures the key results of our experimental data in human subjects, including the effect that recent experience has on the variance-bias tradeoff. This network also provides a good approximation of a normative Bayesian estimator. These observations illustrate how associative learning can incorporate recent experience into ongoing computations in a statistically principled way.
Figures
References
-
- Avillac M, Denève S, Olivier E, Pouget A, Duhamel JR. Reference frames for representing visual and tactile locations in parietal cortex. Nat Neurosci. 2005;8:941–949. - PubMed
-
- Burnod Y, Baraduc P, Battaglia-Mayer A, Guigon E, Koechlin E, Ferraina S, Lacquaniti F, Caminiti R. Parieto-frontal coding of reaching: an integrated framework. Exp Brain Res. 1999;129:325–346. - PubMed
-
- Deneve S, Pouget A. Bayesian multisensory integration and cross-modal spatial links. J Physiol Paris. 2004;98:249–258. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources