

Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion
- PMID: 21768042
- PMCID: PMC3235670
- DOI: 10.1109/TBME.2011.2161671
Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion
Abstract
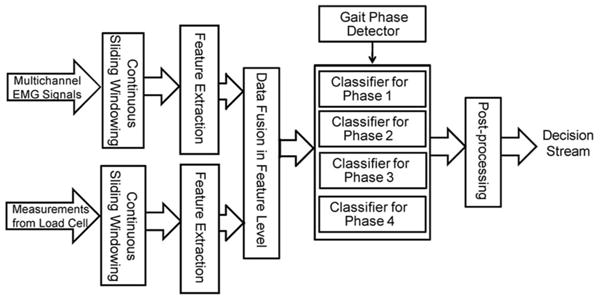
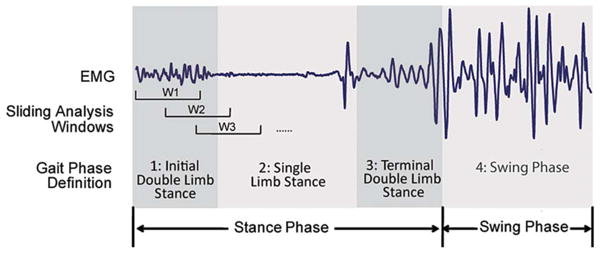
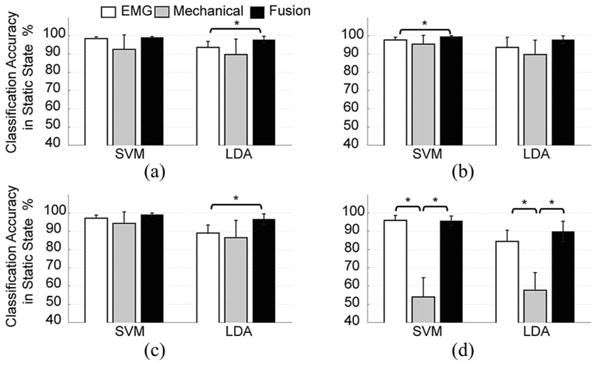
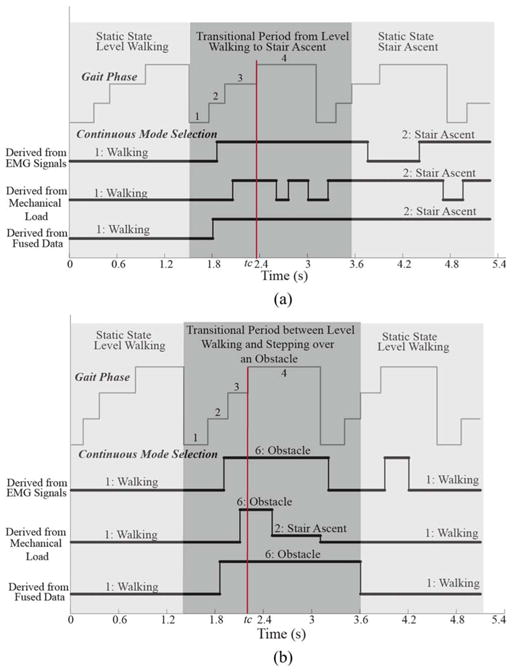
In this study, we developed an algorithm based on neuromuscular-mechanical fusion to continuously recognize a variety of locomotion modes performed by patients with transfemoral (TF) amputations. Electromyographic (EMG) signals recorded from gluteal and residual thigh muscles and ground reaction forces/moments measured from the prosthetic pylon were used as inputs to a phase-dependent pattern classifier for continuous locomotion-mode identification. The algorithm was evaluated using data collected from five patients with TF amputations. The results showed that neuromuscular-mechanical fusion outperformed methods that used only EMG signals or mechanical information. For continuous performance of one walking mode (i.e., static state), the interface based on neuromuscular-mechanical fusion and a support vector machine (SVM) algorithm produced 99% or higher accuracy in the stance phase and 95% accuracy in the swing phase for locomotion-mode recognition. During mode transitions, the fusion-based SVM method correctly recognized all transitions with a sufficient predication time. These promising results demonstrate the potential of the continuous locomotion-mode classifier based on neuromuscular-mechanical fusion for neural control of prosthetic legs.
Figures
References
-
- Lusardi MM, Nielsen CC. Orthotics and Prosthetics in Rehabilitation. Boston: Butterworth-Heinemann; 2000.
-
- Pernot HFM, De Witte LP, Lindeman E, Cluitmans J. Daily functioning of the lower extremity amputee: An overview of the literature. Clin Rehabil. 1997;11:93–106. - PubMed
-
- Martinez-Villalpando EC, Herr H. Agonist-antagonist active knee prosthesis: A preliminary study in level-ground walking. J Rehabil Res Devlop. 2009;46:361–373. - PubMed
-
- Au S, Berniker M, Herr H. Powered ankle–foot prosthesis to assist level-ground and stair-descent gaits. Neural Netw. 2008;21:654–666. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous
