

Visual force feedback in laparoscopic training
- PMID: 21858573
- PMCID: PMC3242944
- DOI: 10.1007/s00464-011-1861-4
Visual force feedback in laparoscopic training
Abstract
Background: To improve endoscopic surgical skills, an increasing number of surgical residents practice on box or virtual reality (VR) trainers. Current training is focused mainly on hand-eye coordination. Training methods that focus on applying the right amount of force are not yet available.
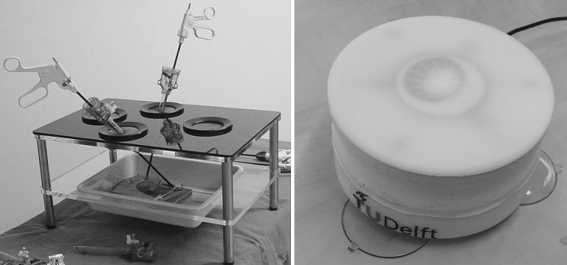
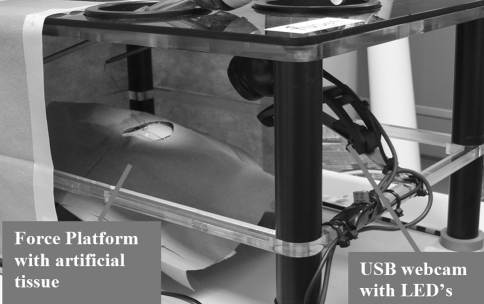
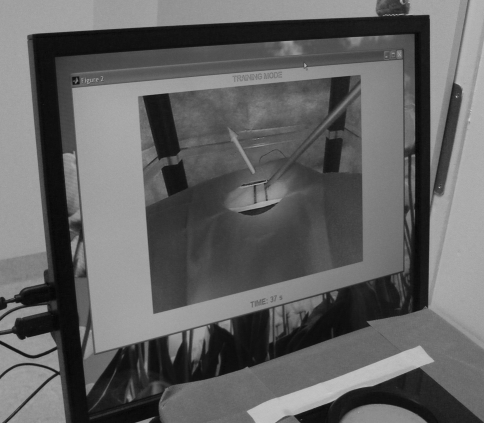
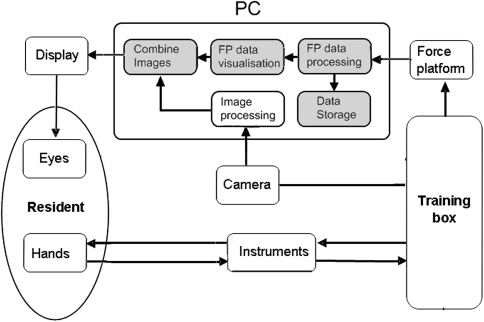
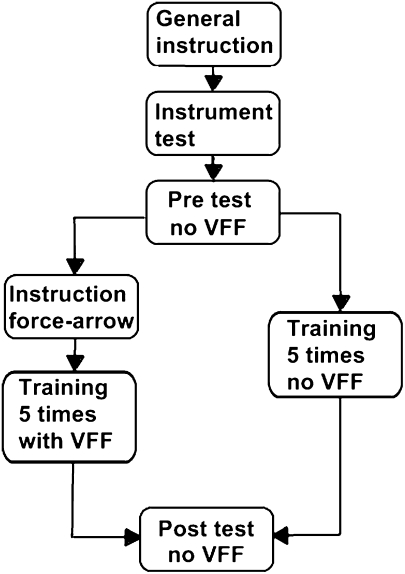
Methods: The aim of this project is to develop a low-cost training system that measures the interaction force between tissue and instruments and displays a visual representation of the applied forces inside the camera image. This visual representation continuously informs the subject about the magnitude and the direction of applied forces. To show the potential of the developed training system, a pilot study was conducted in which six novices performed a needle-driving task in a box trainer with visual feedback of the force, and six novices performed the same task without visual feedback of the force. All subjects performed the training task five times and were subsequently tested in a post-test without visual feedback.
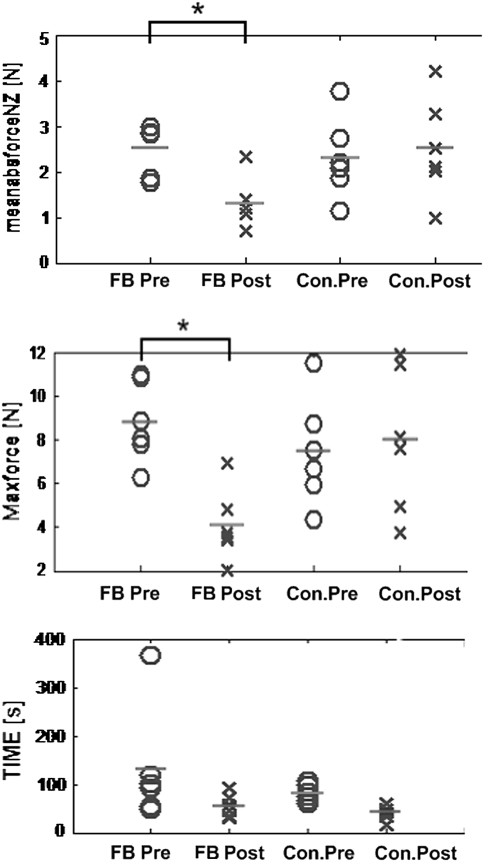
Results: The subjects who received visual feedback during training exerted on average 1.3 N (STD 0.6 N) to drive the needle through the tissue during the post-test. This value was considerably higher for the group that received no feedback (2.6 N, STD 0.9 N). The maximum interaction force during the post-test was noticeably lower for the feedback group (4.1 N, STD 1.1 N) compared with that of the control group (8.0 N, STD 3.3 N).
Conclusions: The force-sensing training system provides us with the unique possibility to objectively assess tissue-handling skills in a laboratory setting. The real-time visualization of applied forces during training may facilitate acquisition of tissue-handling skills in complex laparoscopic tasks and could stimulate proficiency gain curves of trainees. However, larger randomized trials that also include other tasks are necessary to determine whether training with visual feedback about forces reduces the interaction force during laparoscopic surgery.
Figures

References
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
