

doi: 10.1117/1.3622492.
Common-path low-coherence interferometry fiber-optic sensor guided microincision
Affiliations
- PMID: 21950912
- PMCID: PMC3188640
- DOI: 10.1117/1.3622492
Item in Clipboard
Common-path low-coherence interferometry fiber-optic sensor guided microincision
J Biomed Opt.
2011 Sep.
Abstract
We propose and demonstrate a common-path low-coherence interferometry (CP-LCI) fiber-optic sensor guided precise microincision. The method tracks the target surface and compensates the tool-to-surface relative motion with better than ± 5 μm resolution using a precision micromotor connected to the tool tip. A single-fiber distance probe integrated microdissector was used to perform an accurate 100 μm incision into the surface of an Intralipid phantom. The CP-LCI guided incision quality in terms of depth was evaluated afterwards using three-dimensional Fourier-domain optical coherence tomography imaging, which showed significant improvement of incision accuracy compared to free-hand-only operations.
Figures
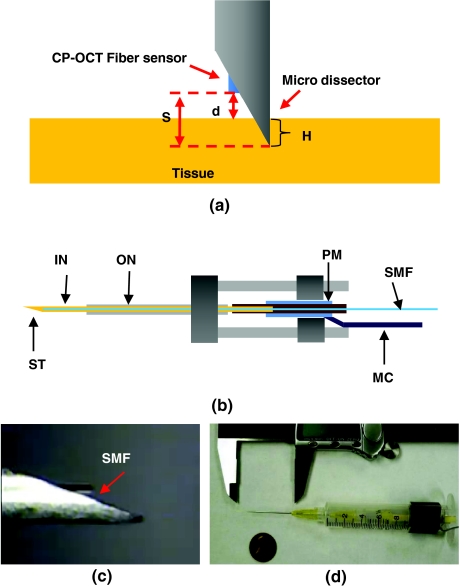
(a) Schematic for CP-LCI guided microincision. S, distance between fiber sensor tip and microdissector tip; d, distance from fiber sensor tip to target tissue surface; H, microincision depth. (b) Design of the free hand-holding tool, IN: inner needle for surgical tool mounting; ON: outer needle for protection and alignment; ST: surgical tip; PM: piezoelectric micromotor; MC: micromotor cord; SMF: single mode fiber. (c) A CP-LCI integrated microdissector made from a hypodermic needle. (d) A prototype of the handheld tool.
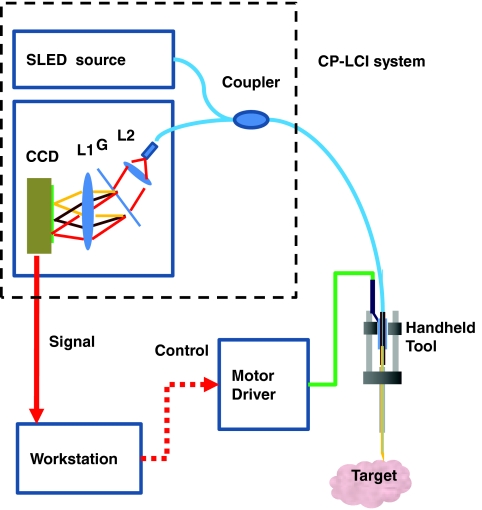
System schematic. CCD, CCD line scan camera; G, grating; L1, L2 achromatic lenses.
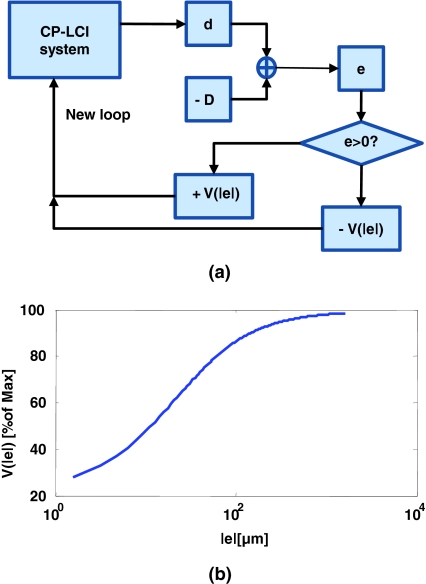
(a) System control flowchart; (b) speed control curve.
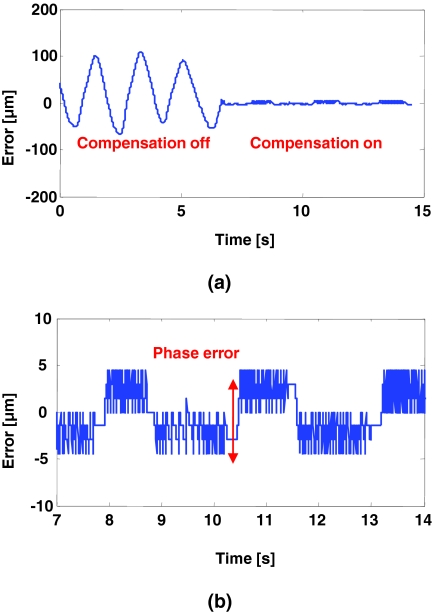
Results for motion compensation.
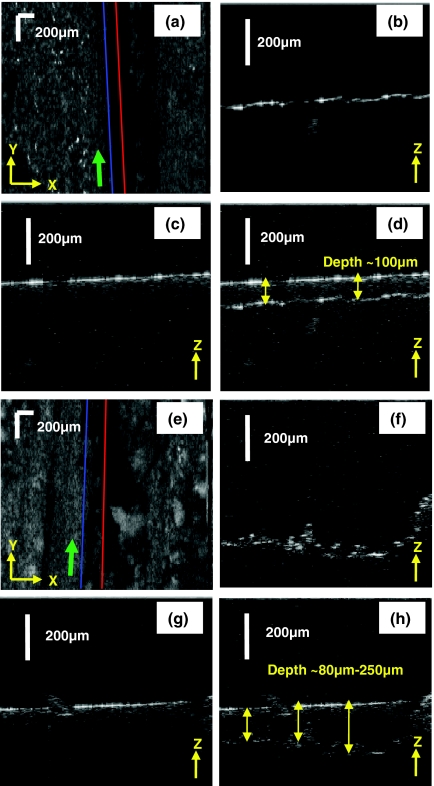
CP-LCI guided micro-incision: (a) En face projection image of the incision region; (b) B-scan along the red trace (right line) in (a), bottom of incision; (c) B-scan along the blue trace (left line) in (a), top of incision; (d) combination of (b) and (c). The free-hand micro-incision situation is performed as (e) and (f), corresponding to (a) and (b), respectively. The green arrows on (a) and (e) indicate the incision direction. (Color online only.)
References
-
- Riviere C. N., Ang W. T., and Khosla P. K., “Toward active tremor canceling in handheld microsurgical instruments,” IEEE Trans. Rob. Autom. 19, 793–800 (2003).10.1109/TRA.2003.817506 - DOI
-
- Rizzo S., Patelli F., and Chow D. R., Vitreo-retinal Surgery, Springer-Verlag, Berlin Heidelberg: (2009).
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
