

Estimating the relevance of world disturbances to explain savings, interference and long-term motor adaptation effects
- PMID: 21998574
- PMCID: PMC3188508
- DOI: 10.1371/journal.pcbi.1002210
Estimating the relevance of world disturbances to explain savings, interference and long-term motor adaptation effects
Abstract
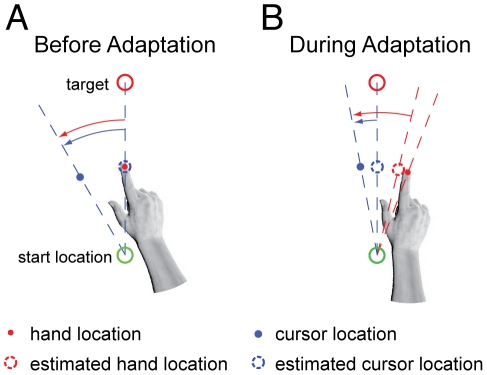
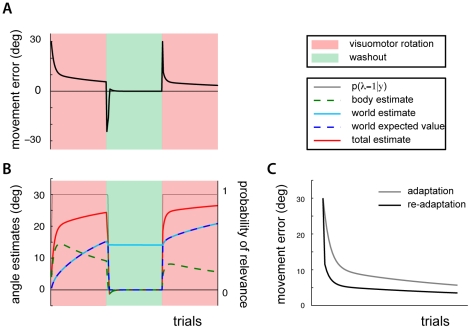
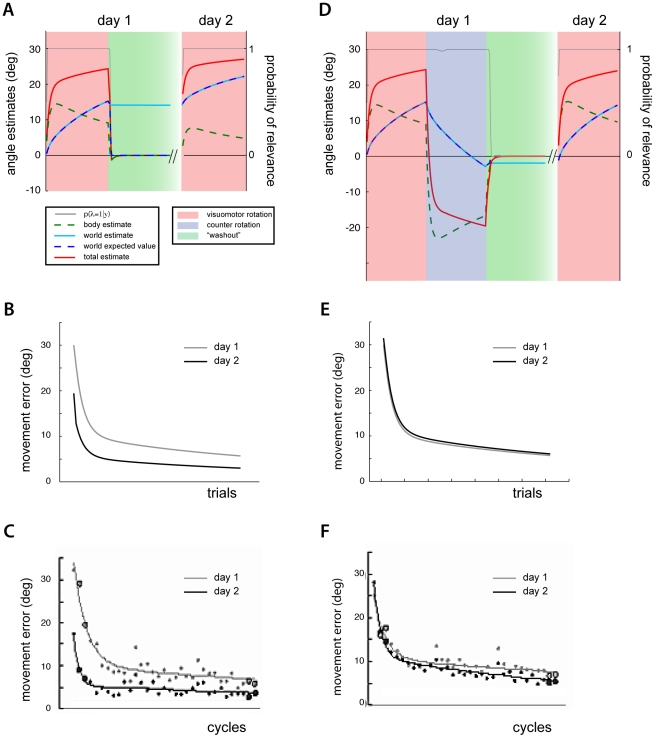
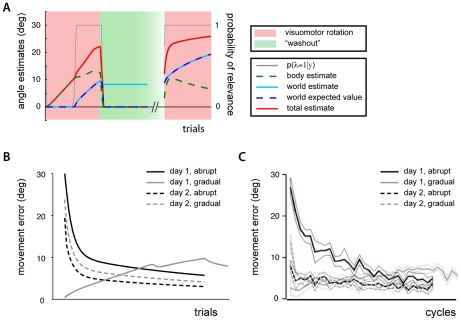
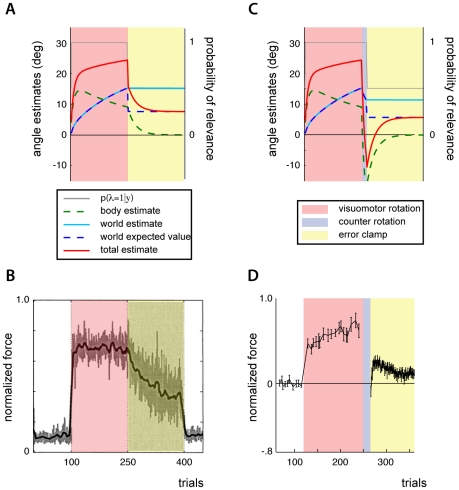
Recent studies suggest that motor adaptation is the result of multiple, perhaps linear processes each with distinct time scales. While these models are consistent with some motor phenomena, they can neither explain the relatively fast re-adaptation after a long washout period, nor savings on a subsequent day. Here we examined if these effects can be explained if we assume that the CNS stores and retrieves movement parameters based on their possible relevance. We formalize this idea with a model that infers not only the sources of potential motor errors, but also their relevance to the current motor circumstances. In our model adaptation is the process of re-estimating parameters that represent the body and the world. The likelihood of a world parameter being relevant is then based on the mismatch between an observed movement and that predicted when not compensating for the estimated world disturbance. As such, adapting to large motor errors in a laboratory setting should alert subjects that disturbances are being imposed on them, even after motor performance has returned to baseline. Estimates of this external disturbance should be relevant both now and in future laboratory settings. Estimated properties of our bodies on the other hand should always be relevant. Our model demonstrates savings, interference, spontaneous rebound and differences between adaptation to sudden and gradual disturbances. We suggest that many issues concerning savings and interference can be understood when adaptation is conditioned on the relevance of parameters.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Schaal S, Schweighofer N. Computational motor control in humans and robots. Curr Opin Neurobiol. 2005;15:675–682. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
