

Identification of neural feedback for upright stance in humans: stabilization rather than sway minimization
- PMID: 22016548
- PMCID: PMC3470452
- DOI: 10.1523/JNEUROSCI.1013-11.2011
Identification of neural feedback for upright stance in humans: stabilization rather than sway minimization
Abstract
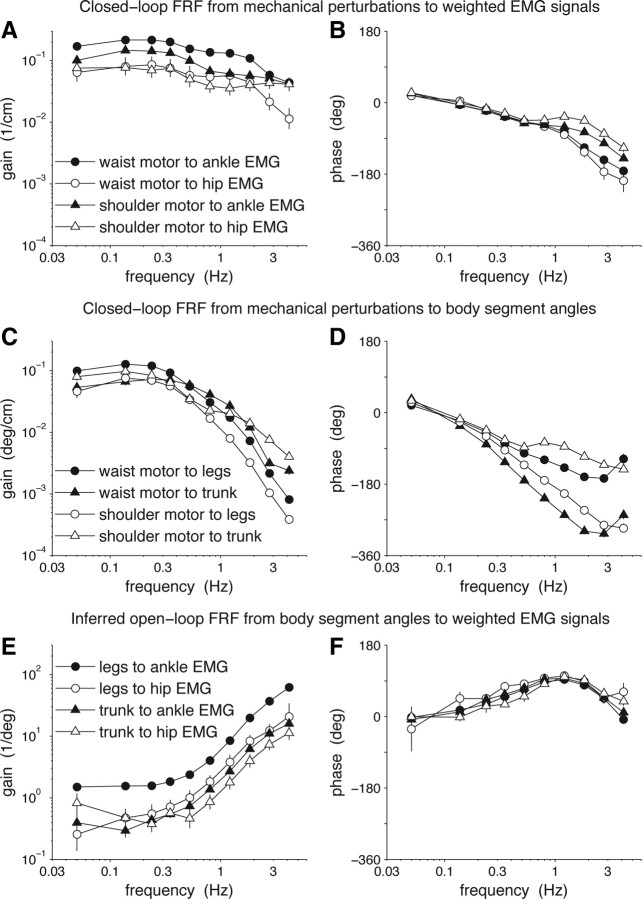
A fundamental issue in motor control is how to determine the task goals for a given behavior. Here, we address this question by separately identifying the musculoskeletal and feedback components of the human postural control loop. Eighteen subjects were perturbed by two mechanical perturbations (gentle pulling from behind at waist and shoulder levels) and one sensory perturbation (movement of a virtual visual scene). Body kinematics was described by the leg and trunk segment angles in the sagittal plane. Muscle activations were described by ankle and hip EMG signals, with each EMG signal computed as a weighted sum of rectified EMG signals from multiple muscles at the given joint. The mechanical perturbations were used to identify feedback, defined as the mapping from the two segment angles to the two EMG signals. The sensory perturbation was used to estimate parameters in a mechanistic model of the plant, defined as the mapping from the two EMG signals to the two segment angles. Using the plant model and optimal control theory, we compared identified feedback to optimal feedback for a range of cost functions. Identified feedback was similar to feedback that stabilizes upright stance with near-minimum muscle activation, but was not consistent with feedback that substantially increases muscle activation to reduce movements of the body's center of mass or center of pressure. The results suggest that the common assumption of reducing sway may not apply to musculoskeletal systems that are inherently unstable.
Figures





References
-
- Barin K. Dynamic posturography: analysis of error in force plate measurement of postural sway. IEEE Eng Med Biol Mag. 1992;11:52–56.
-
- Bendat JS, Piersol AG. Random data: analysis and measurement procedures. Ed 3. New York: Wiley; 2000.
-
- Bernstein N. The co-ordination and regulation of movements. Oxford: Pergamon; 1967.
-
- Bryson AE, Ho YC. Applied optimal control: optimization, estimation, and control. New York: Wiley; 1975.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical