

Continuous three-dimensional control of a virtual helicopter using a motor imagery based brain-computer interface
- PMID: 22046274
- PMCID: PMC3202533
- DOI: 10.1371/journal.pone.0026322
Continuous three-dimensional control of a virtual helicopter using a motor imagery based brain-computer interface
Abstract
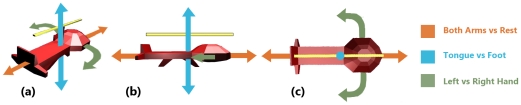
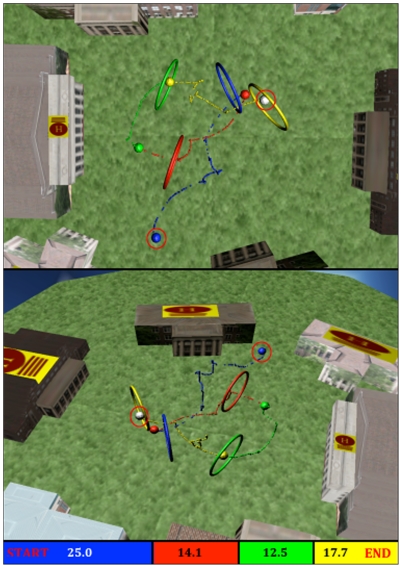
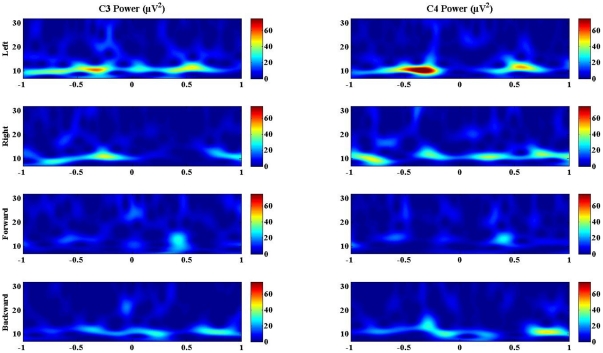
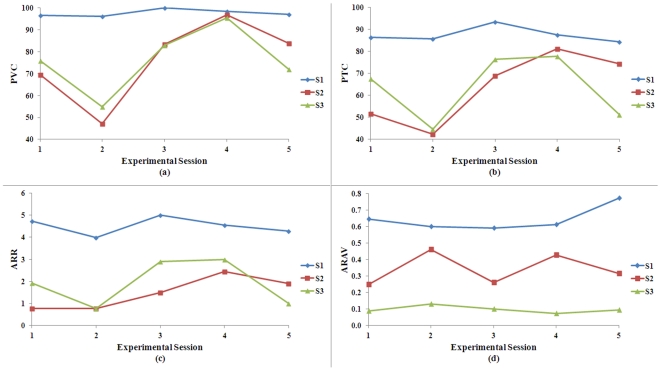
Brain-computer interfaces (BCIs) allow a user to interact with a computer system using thought. However, only recently have devices capable of providing sophisticated multi-dimensional control been achieved non-invasively. A major goal for non-invasive BCI systems has been to provide continuous, intuitive, and accurate control, while retaining a high level of user autonomy. By employing electroencephalography (EEG) to record and decode sensorimotor rhythms (SMRs) induced from motor imaginations, a consistent, user-specific control signal may be characterized. Utilizing a novel method of interactive and continuous control, we trained three normal subjects to modulate their SMRs to achieve three-dimensional movement of a virtual helicopter that is fast, accurate, and continuous. In this system, the virtual helicopter's forward-backward translation and elevation controls were actuated through the modulation of sensorimotor rhythms that were converted to forces applied to the virtual helicopter at every simulation time step, and the helicopter's angle of left or right rotation was linearly mapped, with higher resolution, from sensorimotor rhythms associated with other motor imaginations. These different resolutions of control allow for interplay between general intent actuation and fine control as is seen in the gross and fine movements of the arm and hand. Subjects controlled the helicopter with the goal of flying through rings (targets) randomly positioned and oriented in a three-dimensional space. The subjects flew through rings continuously, acquiring as many as 11 consecutive rings within a five-minute period. In total, the study group successfully acquired over 85% of presented targets. These results affirm the effective, three-dimensional control of our motor imagery based BCI system, and suggest its potential applications in biological navigation, neuroprosthetics, and other applications.
Conflict of interest statement
Figures

References
-
- Hochberg LR, Serruya MD, Friehs GM, Mukand JA, Saleh M, et al. Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature. 2006;442:164–171. - PubMed
-
- Kennedy PR, Bakay RAE, Moore MM, Adams K, Goldwaithe J. Direct control of a computer from the human central nervous system. Rehabilitation Engineering, IEEE Transactions on. 2000;8:198–202. - PubMed
-
- Musallam S, Corneil BD, Greger B, Scherberger H, Andersen RA. Cognitive Control Signals for Neural Prosthetics. Science. 2004;305:258–262. - PubMed
-
- Santhanam G, Ryu SI, Yu BM, Afshar A, Shenoy KV. A high-performance brain–computer interface. Nature. 2006;442:195–198. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
