

Static prehension of a horizontally oriented object in three dimensions
- PMID: 22071684
- PMCID: PMC3259284
- DOI: 10.1007/s00221-011-2923-5
Static prehension of a horizontally oriented object in three dimensions
Abstract
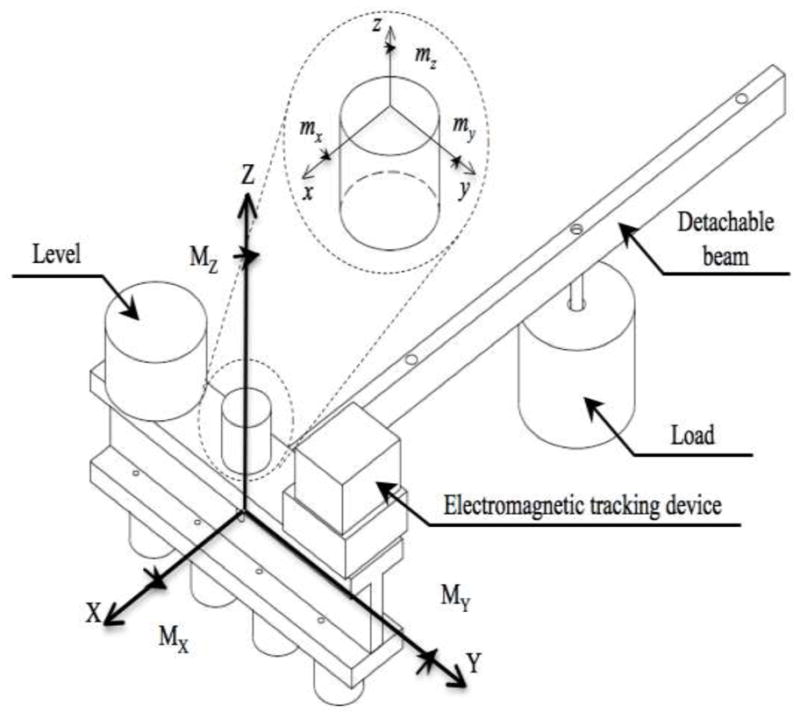
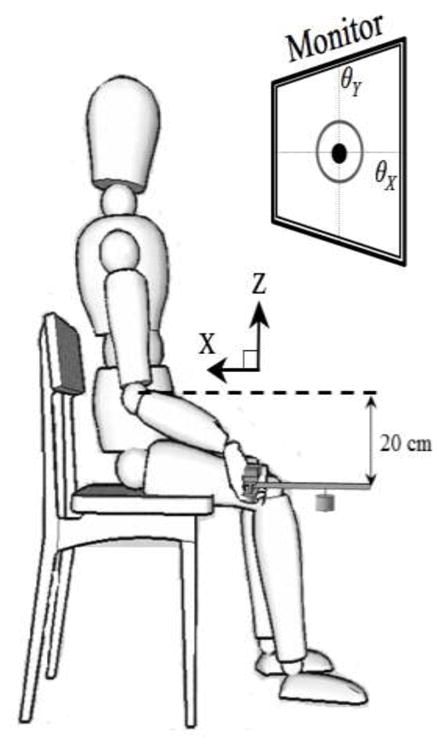
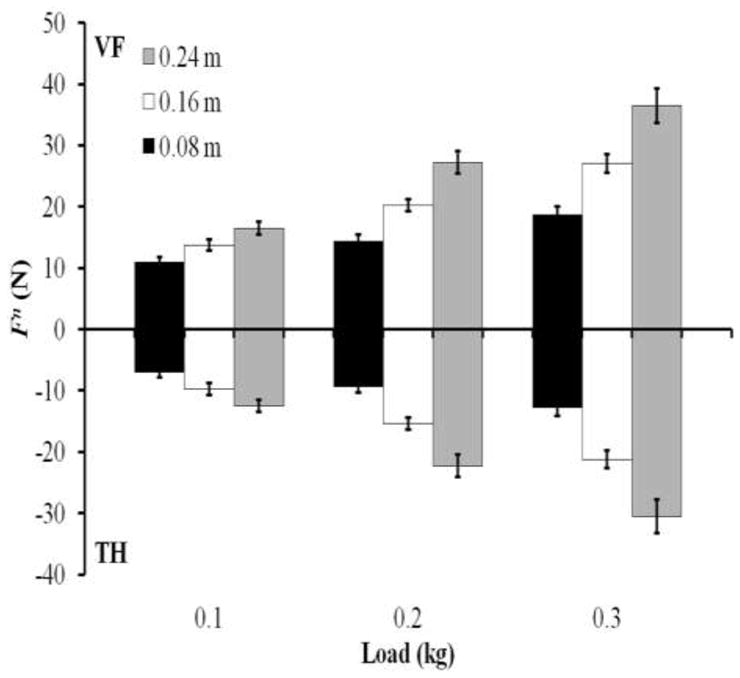
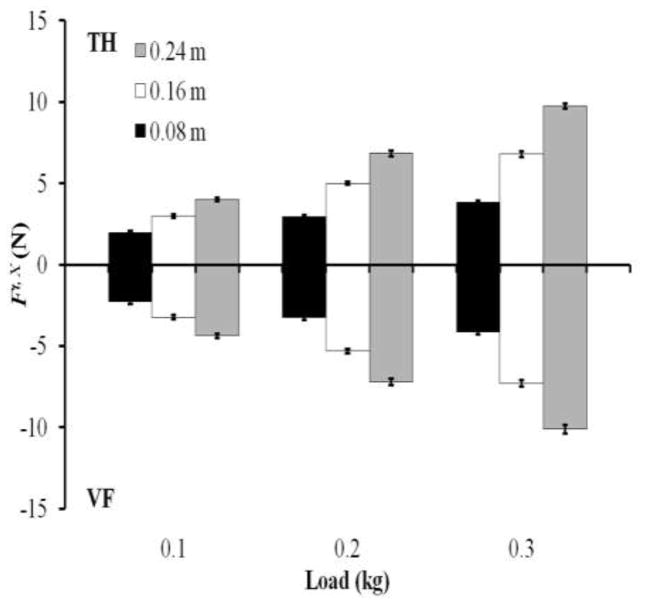
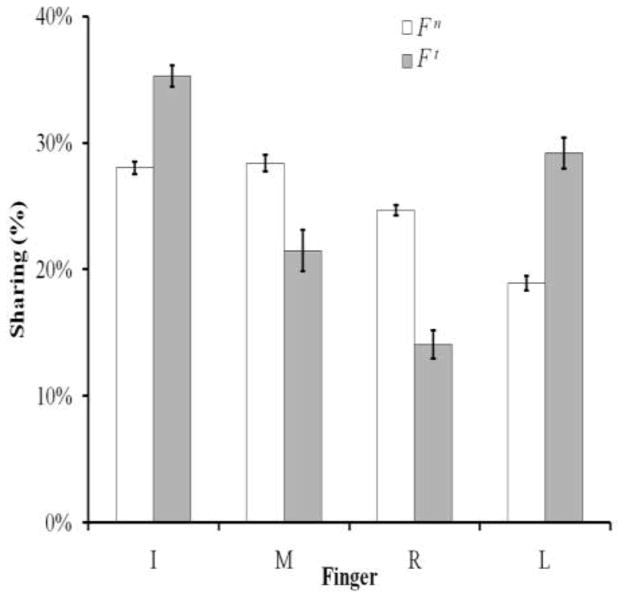
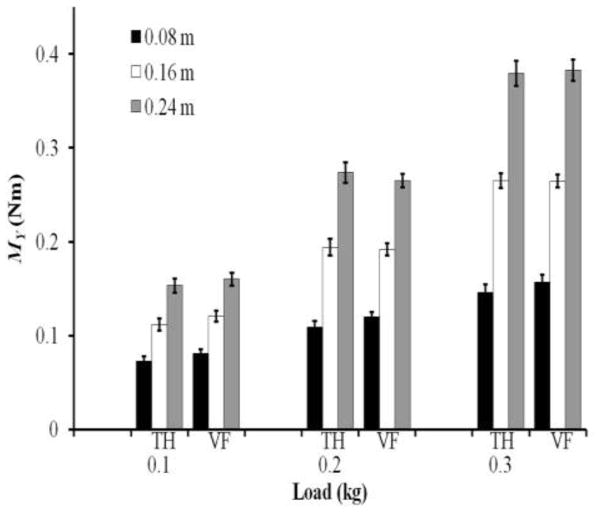
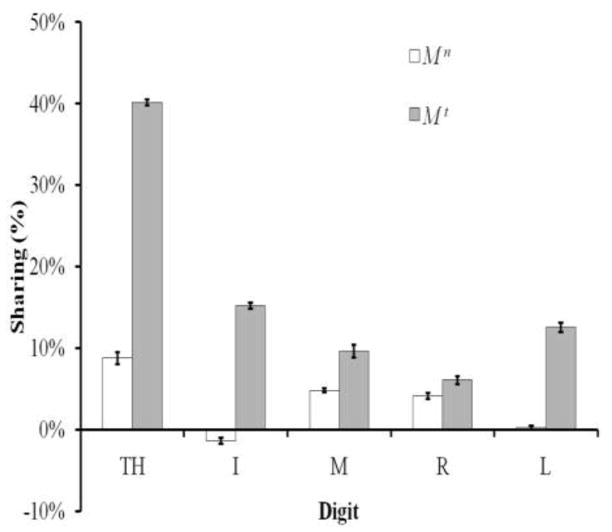
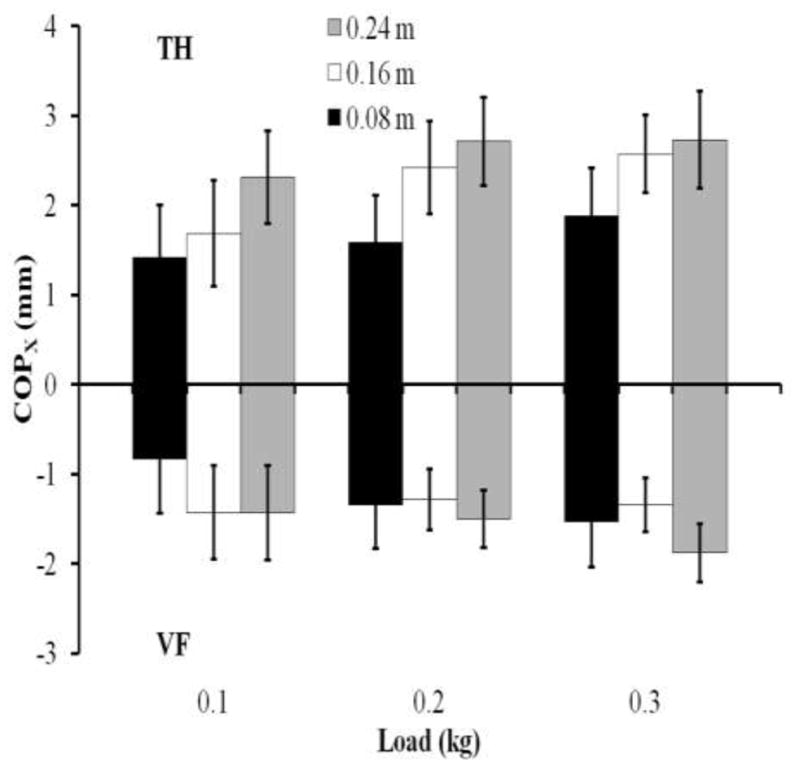
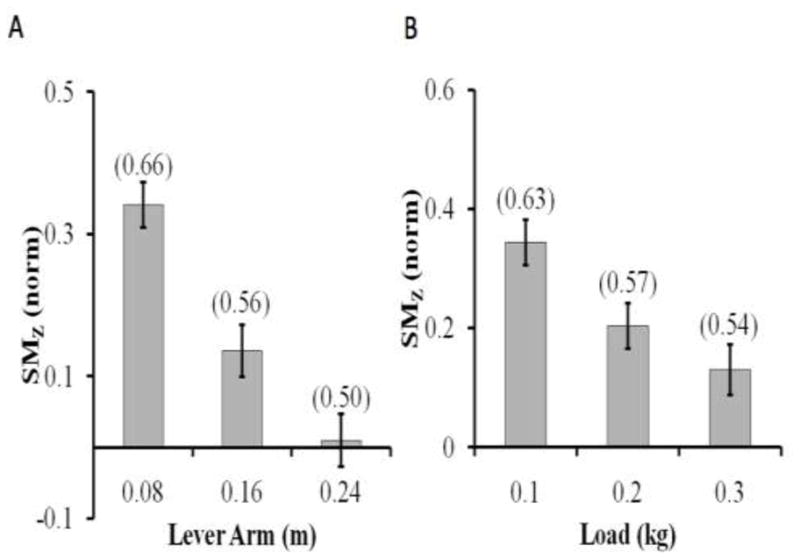
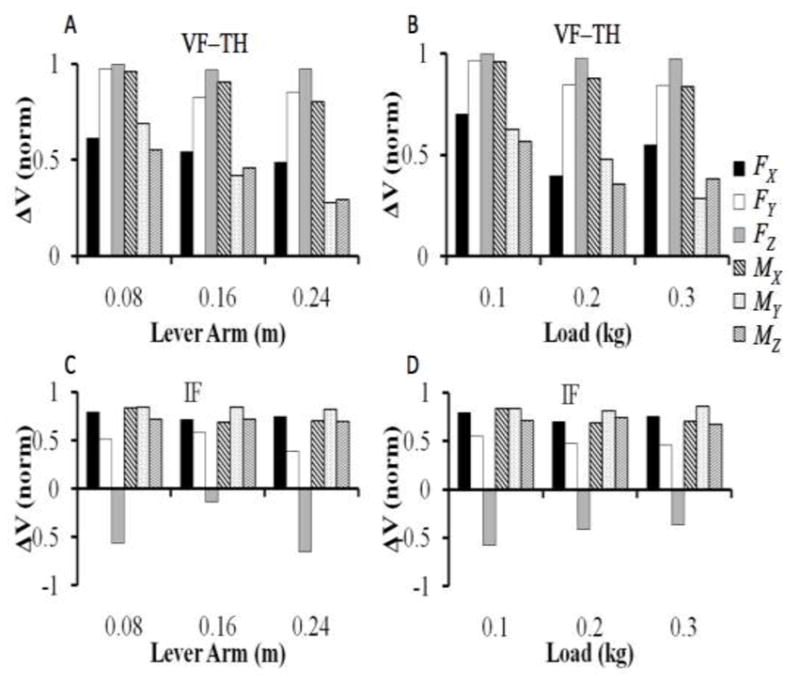
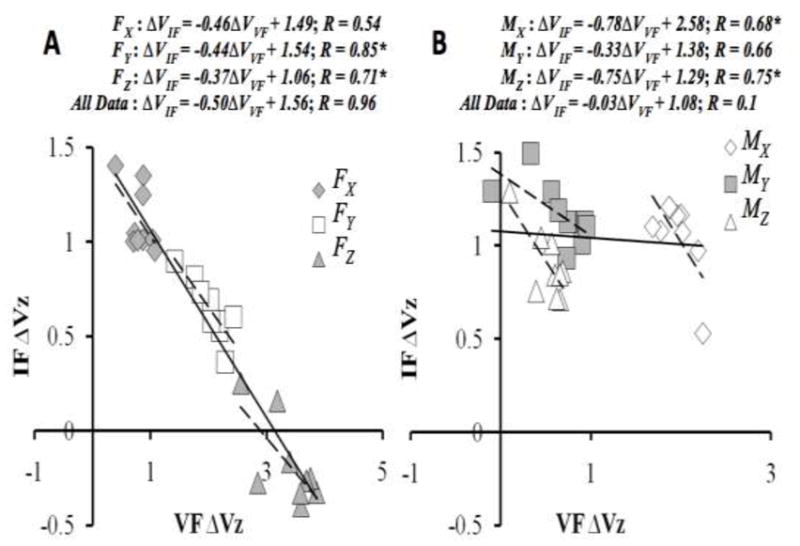
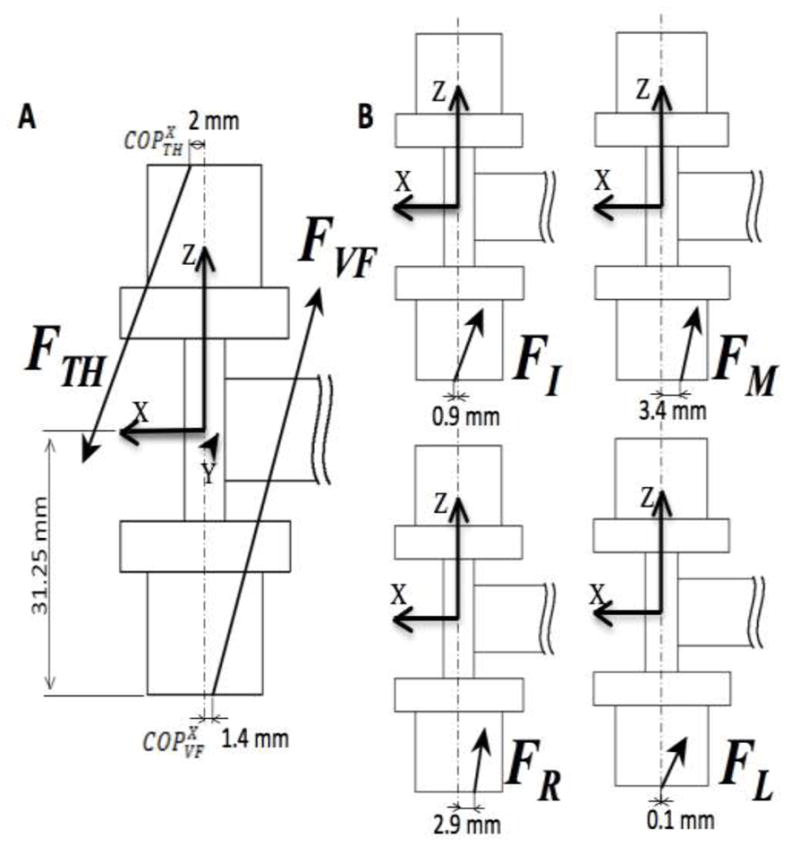
We studied static prehension of a horizontally oriented object. Specific hypotheses were explored addressing such issues as the sharing patterns of the total moment of force across the digits, presence of mechanically unnecessary digit forces, and trade-off between multi-digit synergies at the two levels of the assumed control hierarchy. Within the assumed hierarchy, at the upper level, the task is shared between the thumb and virtual finger (an imagined finger producing a wrench equal to the sum of the wrenches of individual fingers). At the lower level, action of the virtual finger is shared among the four actual fingers. The subjects held statically a horizontally oriented handle instrumented with six-component force/torque sensors with different loads and torques acting about the long axis of the handle. The thumb acted from above while the four fingers supported the weight of the object. When the external torque was zero, the thumb produced mechanically unnecessary force of about 2.8 N, which did not depend on the external load magnitude. When the external torque was not zero, tangential forces produced over 80% of the total moment of force. The normal forces by the middle and ring fingers produced consistent moments against the external torque, while the normal forces of the index and little fingers did not. Force and moment variables at both hierarchical levels were stabilized by covaried across trials adjustments of forces/moments produced by individual digits with the exception of the normal force analyzed at the lower level of the hierarchy. There was a trade-off between synergy indices computed at the two levels of the hierarchy for the three components of the total force vector, but not for the moment of force components. Overall, the results have shown that task mechanics are only one factor that defines forces produced by individual digits. Other factors, such as loading sensory receptors may lead to mechanically unnecessary forces. There seems to be no single rule (for example, ensuring similar safety margin values) that would describe sharing of the normal and tangential forces and be valid across tasks. Fingers that are traditionally viewed as less accurate (e.g., the ring finger) may perform more consistently in certain tasks. The observations of the trade-off between the synergy indices computed at two levels for the force variables but not for the moment of force variables suggest that the degree of redundancy (the number of excessive elemental variables) at the higher level is an important factor.
Figures
References
-
- Arbib MA, Iberall T, Lyons D. Coordinated control programs for movements of the hand. In: Goodwin AW, Darian-Smith I, editors. Hand Function and the Neocortex. Berlin: Springer Verlag; 1985. pp. 111–129.
-
- Baud-Bovy G, Soechting JF. Two virtual fingers in the control of the tripod grasp. J Neurophysiol l. 2001;86:604–615. - PubMed
-
- Burstedt MK, Edin BB, Johansson RS. Coordination of fingertip forces during human manipulation can emerge from independent neural networks controlling each engaged digit. Exp Brain Res. 1997;117:67–79. - PubMed
-
- Burstedt MK, Flanagan JR, Johansson RS. Control of grasp stability in humans under different frictional conditions during multidigit manipulation. J Neurophysiol. 1999;82:2393–2405. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
