

Validation of a biofeedback system for wheelchair propulsion training
- PMID: 22110977
- PMCID: PMC3196933
- DOI: 10.1155/2011/590780
Validation of a biofeedback system for wheelchair propulsion training
Abstract
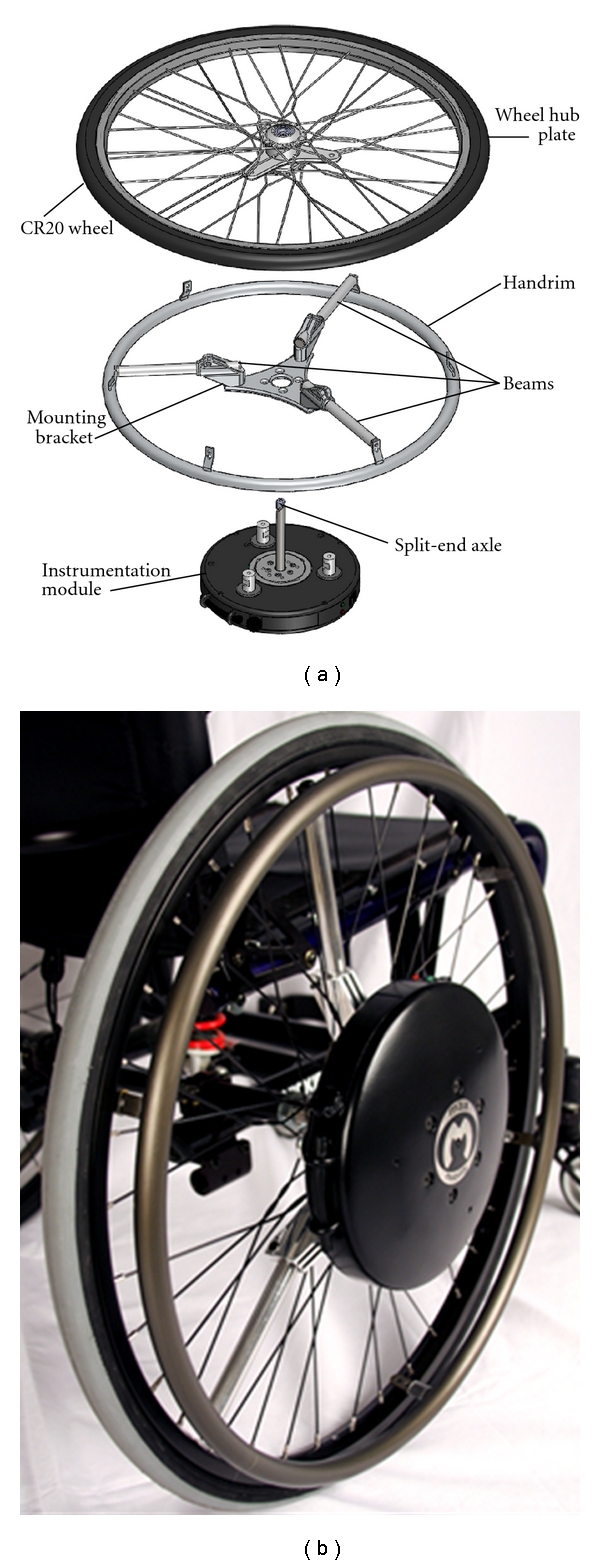
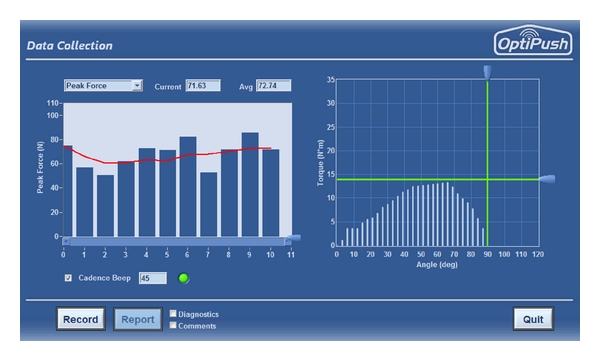
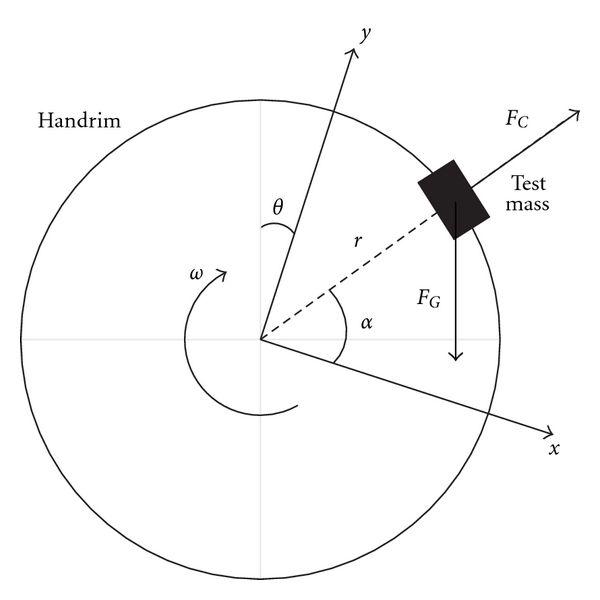
This paper describes the design and validation of the OptiPush Biofeedback System, a commercially available, instrumented wheel system that records handrim biomechanics and provides stroke-by-stroke biofeedback and targeting for 11 propulsion variables. Testing of the system revealed accurate measurement of wheel angle (0.02% error), wheel speed (0.06% error), and handrim loads. The maximum errors in static force and torque measurements were 3.80% and 2.05%, respectively. Measured forces were also found to be highly linear (0.985 < slope < 1.011) and highly correlated to the reference forces (r(2) > .998). Dynamic measurements of planar forces (F(x) and F(y)) and axle torque also had low error (-0.96 N to 0.83 N for force and 0.10 Nm to 0.14 Nm for torque) and were highly correlated (r > .986) with expected force and torque values. Overall, the OptiPush Biofeedback System provides accurate measurement of wheel dynamics and handrim biomechanics and may be a useful tool for improving manual wheelchair propulsion.
Figures
Similar articles
-
Design and Fabrication of an Instrumented Handrim to Measure the Kinetic and Kinematic Information by the Hand of User for 3D Analysis of Manual Wheelchair Propulsion Dynamics.J Med Signals Sens. 2014 Oct;4(4):256-66. J Med Signals Sens. 2014. PMID: 25426429 Free PMC article.
-
Variability in bimanual wheelchair propulsion: consistency of two instrumented wheels during handrim wheelchair propulsion on a motor driven treadmill.J Neuroeng Rehabil. 2013 Jan 29;10:9. doi: 10.1186/1743-0003-10-9. J Neuroeng Rehabil. 2013. PMID: 23360756 Free PMC article.
-
Comparing handrim biomechanics for treadmill and overground wheelchair propulsion.Spinal Cord. 2011 Mar;49(3):457-62. doi: 10.1038/sc.2010.149. Epub 2010 Nov 2. Spinal Cord. 2011. PMID: 21042332 Free PMC article.
-
Effect of Haptic Training During Manual Wheelchair Propulsion on Shoulder Joint Reaction Moments.Front Rehabil Sci. 2022 Apr 5;3:827534. doi: 10.3389/fresc.2022.827534. eCollection 2022. Front Rehabil Sci. 2022. PMID: 36188985 Free PMC article.
-
Technical Note: A Novel Servo-Driven Dual-Roller Handrim Wheelchair Ergometer.IEEE Trans Neural Syst Rehabil Eng. 2020 Apr;28(4):953-960. doi: 10.1109/TNSRE.2020.2965281. Epub 2020 Feb 11. IEEE Trans Neural Syst Rehabil Eng. 2020. PMID: 32070986
Cited by
-
Assessment of a markerless motion analysis system for manual wheelchair application.J Neuroeng Rehabil. 2018 Nov 6;15(1):96. doi: 10.1186/s12984-018-0444-1. J Neuroeng Rehabil. 2018. PMID: 30400917 Free PMC article.
-
An Investigation of Bilateral Symmetry During Manual Wheelchair Propulsion.Front Bioeng Biotechnol. 2015 Jun 11;3:86. doi: 10.3389/fbioe.2015.00086. eCollection 2015. Front Bioeng Biotechnol. 2015. PMID: 26125019 Free PMC article.
-
The influence of wheelchair propulsion technique on upper extremity muscle demand: a simulation study.Clin Biomech (Bristol). 2012 Nov;27(9):879-86. doi: 10.1016/j.clinbiomech.2012.07.002. Epub 2012 Jul 24. Clin Biomech (Bristol). 2012. PMID: 22835860 Free PMC article.
-
A Validation Protocol for an Instrumented Wheel: A Comparison with a Dual-Roller Handrim Wheelchair Ergometer.Methods Protoc. 2025 Mar 3;8(2):25. doi: 10.3390/mps8020025. Methods Protoc. 2025. PMID: 40126243 Free PMC article.
-
Physiological and biomechanical comparison of overground, treadmill, and ergometer handrim wheelchair propulsion in able-bodied subjects under standardized conditions.J Neuroeng Rehabil. 2020 Oct 17;17(1):136. doi: 10.1186/s12984-020-00767-2. J Neuroeng Rehabil. 2020. PMID: 33069257 Free PMC article.
References
-
- Wolfe GA, Waters R, Hislop HJ. Influence of floor surface on the energy cost of wheelchair propulsion. Physical Therapy. 1977;57(9):1022–1027. - PubMed
-
- Hildebrandt G, Voigt ED, Bahn D, Berendes B, Kroger J. Energy cost of propelling a wheelchair at various speeds: cardiac response and the affect of steering accuracy. Archives of Physical Medicine and Rehabilitation. 1970;51(3):131–136. - PubMed
-
- Glaser RM, Sawka MN, Laubach LL, Suryaprasad AG. Metabolic and cardiopulmonary responses to wheelchair and bicycle ergometry. Journal of Applied Physiology Respiratory Environmental and Exercise Physiology. 1979;46(6):1066–1070. - PubMed
-
- Brubaker CE, Ross S. Static and dynamic comparisons of selected handrims for wheelchair propulsion. In: Stamp W, McLaurin CA, editors. Wheelchair Mobility 1976–1981. Rehabilitation Engineering Center, University of Virginia; 1976. pp. 28–31.
-
- van der Woude LHV, Veeger HEJ, Rozendal RH. Propulsion technique in hand rim wheelchair ambulation. Journal of Medical Engineering and Technology. 1989;13(1-2):136–141. - PubMed
LinkOut - more resources
Full Text Sources
