

Iterative Bayesian estimation as an explanation for range and regression effects: a study on human path integration
- PMID: 22114288
- PMCID: PMC6623840
- DOI: 10.1523/JNEUROSCI.2028-11.2011
Iterative Bayesian estimation as an explanation for range and regression effects: a study on human path integration
Abstract
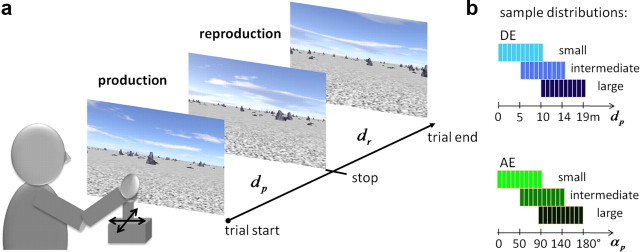
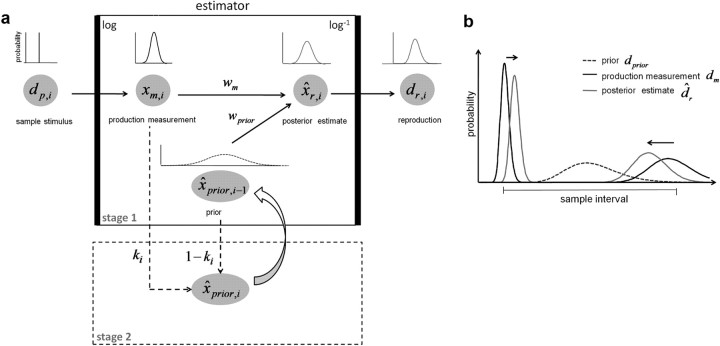
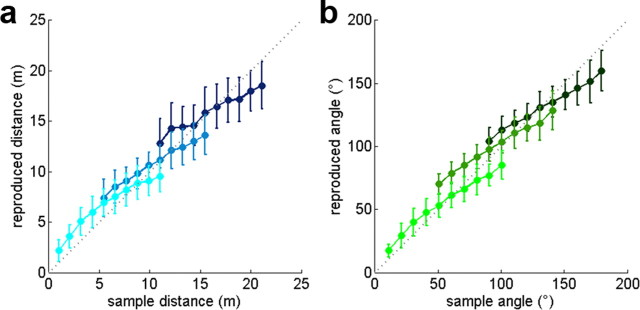
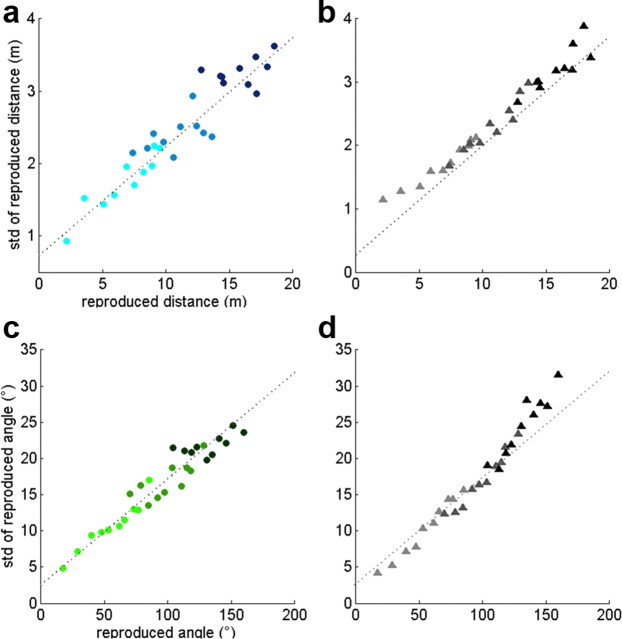
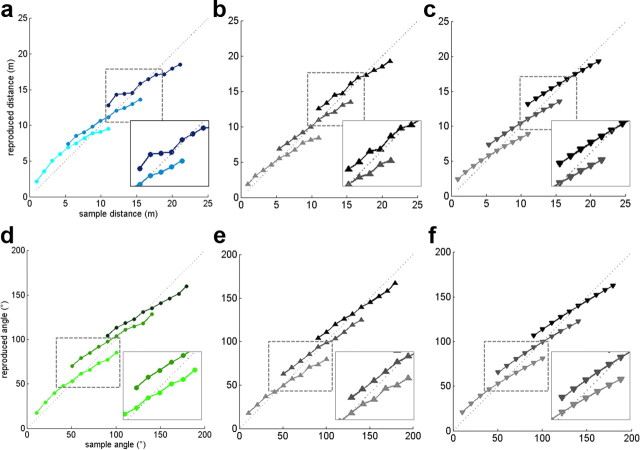
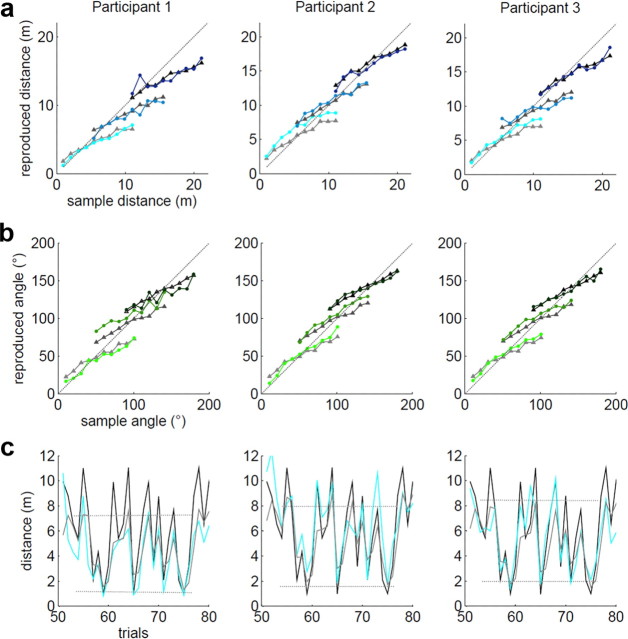
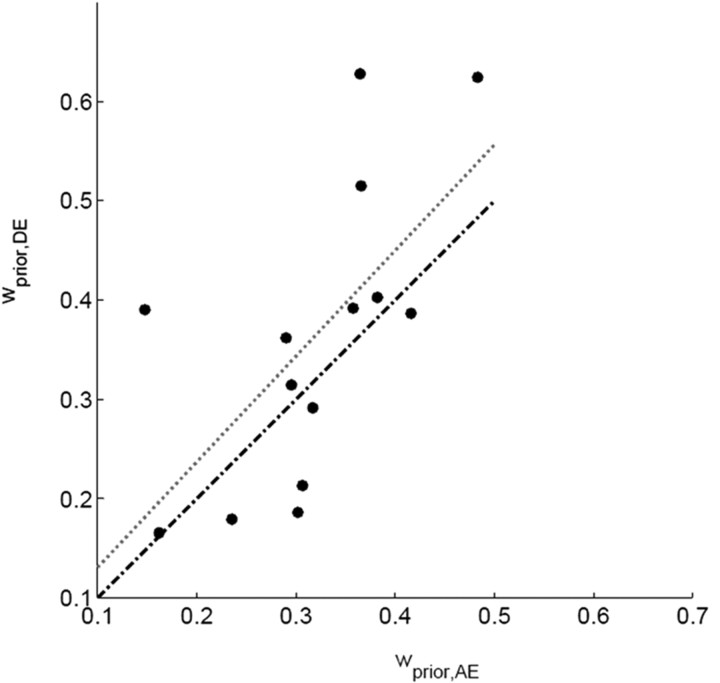
Systematic errors in human path integration were previously associated with processing deficits in the integration of space and time. In the present work, we hypothesized that these errors are de facto the result of a system that aims to optimize its performance by incorporating knowledge about prior experience into the current estimate of displacement. We tested human linear and angular displacement estimation behavior in a production-reproduction task under three different prior experience conditions where samples were drawn from different overlapping sample distributions. We found that (1) behavior was biased toward the center of the underlying sample distribution, (2) the amount of bias increased with increasing sample range, and (3) the standard deviation for all conditions was linearly dependent on the mean reproduced displacements. We propose a model of bayesian estimation on logarithmic scales that explains the observed behavior by optimal fusion of an experience-dependent prior expectation with the current noisy displacement measurement. The iterative update of prior experience is modeled by the formulation of a discrete Kalman filter. The model provides a direct link between Weber-Fechner and Stevens' power law, providing a mechanistic explanation for universal psychophysical effects in human magnitude estimation such as the regression to the mean and the range effect.
Figures
References
-
- Adams WJ, Graf EW, Ernst MO. Experience can change the ‘light-from-above’ prior. Nat Neurosci. 2004;7:1057–1058. - PubMed
-
- Bergmann J, Krauss E, Münch A, Jungmann R, Oberfeld D, Hecht H. Locomotor and verbal distance judgments in action and vista space. Exp Brain Res. 2011;210:13–23. - PubMed
-
- Butler JS, Smith ST, Campos JL, Bülthoff HH. Bayesian integration of visual and vestibular signals for heading. J Vis. 2010;10:23. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources