

Multigait soft robot
- PMID: 22123978
- PMCID: PMC3251082
- DOI: 10.1073/pnas.1116564108
Multigait soft robot
Abstract
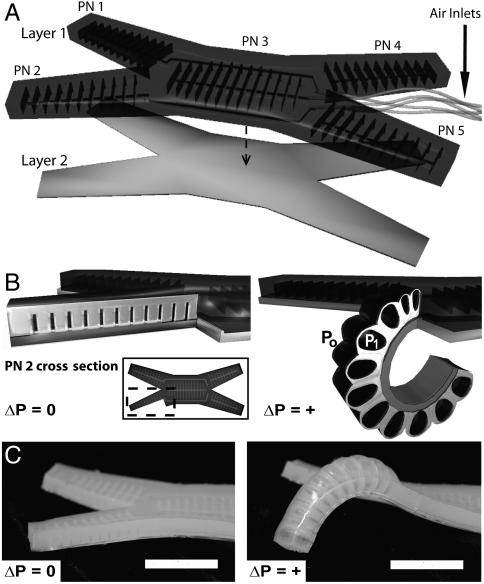
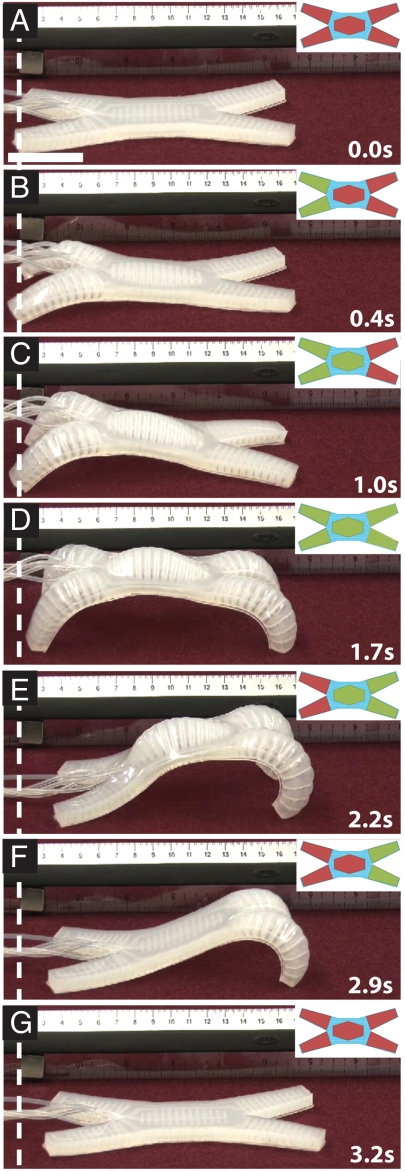
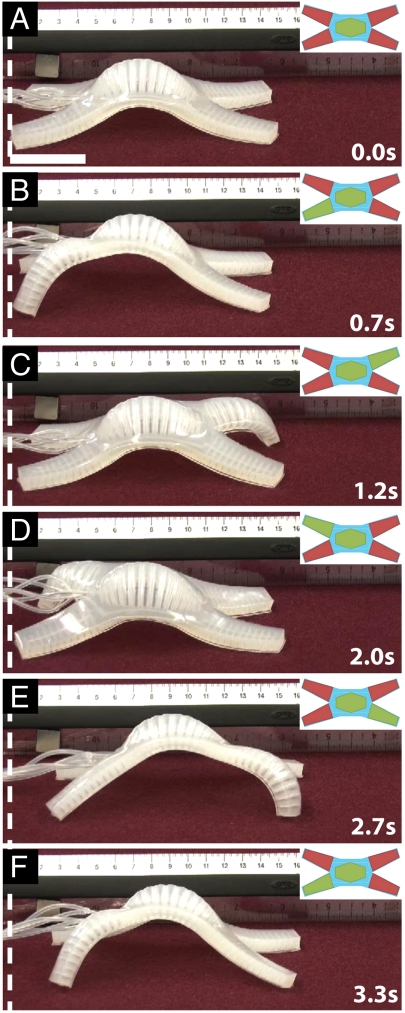
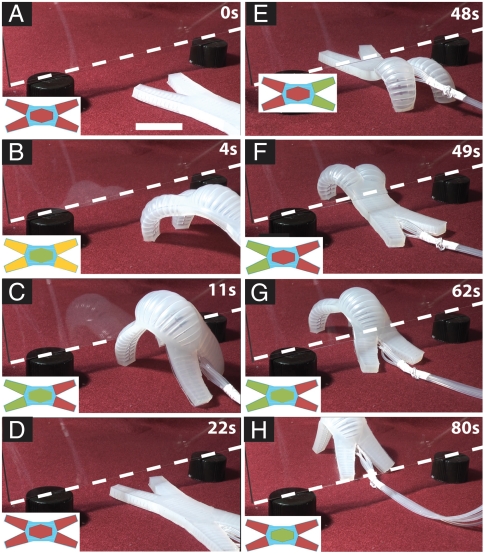
This manuscript describes a unique class of locomotive robot: A soft robot, composed exclusively of soft materials (elastomeric polymers), which is inspired by animals (e.g., squid, starfish, worms) that do not have hard internal skeletons. Soft lithography was used to fabricate a pneumatically actuated robot capable of sophisticated locomotion (e.g., fluid movement of limbs and multiple gaits). This robot is quadrupedal; it uses no sensors, only five actuators, and a simple pneumatic valving system that operates at low pressures (< 10 psi). A combination of crawling and undulation gaits allowed this robot to navigate a difficult obstacle. This demonstration illustrates an advantage of soft robotics: They are systems in which simple types of actuation produce complex motion.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Henten EV, et al. An autonomous robot for harvesting cucumbers in greenhouses. Auton Robots. 2002;13:241–258.
-
- Davison AJ, Reid ID, Molton ND, Stasse O. MonoSLAM: Real-time single camera SLAM. IEEE Trans Pattern Anal Mach Intell. 2007;29:1052–1067. - PubMed
-
- Soatto S, Frezza R, Perona P. Motion estimation via dynamic vision. IEEE Trans Automat Contr. 1996;41:393–413.
-
- Tesch M, et al. Parameterized and scripted gaits for modular snake robots. Adv Robot. 2009;23:1131–1158.
-
- Levy ML, et al. Robotic virtual endoscopy: Development of a multidirectional rigid endoscope. Neurosurgery. 2006;59:134–140. - PubMed
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
Miscellaneous
