

Robotic neurosurgery: a preliminary study using an active vision-guided robotic arm for bone drilling and endoscopic manoeuvres
- PMID: 22135587
- PMCID: PMC3216217
Robotic neurosurgery: a preliminary study using an active vision-guided robotic arm for bone drilling and endoscopic manoeuvres
Abstract
Background: Surgical robots have been appearing in operating rooms over the past decade, and neurosurgery has been one of the pioneers in this area. In neurosurgery, the clinical use of robots has been limited to stereotactic procedures and endoscopic manoeuvres, although the brain is a unique organ and well-suited for robotic application. The aim of this study was to assess the ability of our vision-guided robotic system to perform basic neurosurgical procedures.
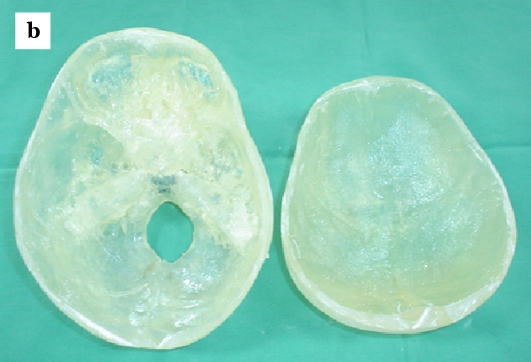
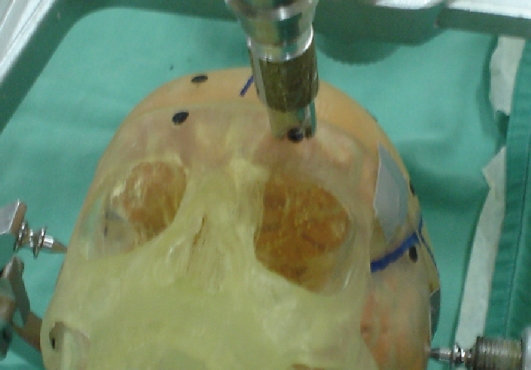
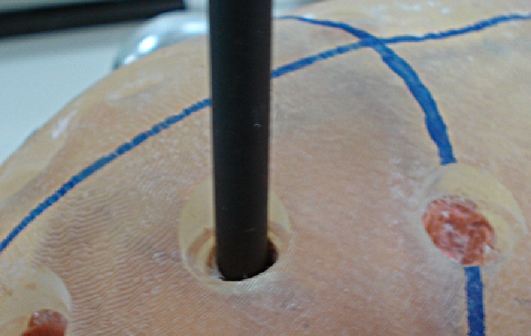
Methods: THE STUDY WAS DIVIDED INTO TWO PARTS: bone drilling and endoscopic manoeuvres. The robotic system was instructed to recognise targets on artificial skull models placed in different positions (supine, lateral, sitting, and prone) and to make burr holes. A total of 10 selected burr holes were used to assess the capability of the robot to insert an endoscope.
Results: The accuracy ranged 0.1-1.0 mm with repeatability ranged 0.03-0.92 mm.
Conclusion: Generally, the present robotic system is able to perform the surgical tasks. However, further study is needed to refine the robotic system, including the safety mechanisms.
Keywords: computer-assisted surgery; endoscopes; neurosurgery; robotics; skull.
Figures


Similar articles
-
A preliminary study of using active vision guided robotic arm for bone drilling in a developing country.J Neurol Surg A Cent Eur Neurosurg. 2014 Mar;75(2):155-7. doi: 10.1055/s-0032-1330954. Epub 2013 May 1. J Neurol Surg A Cent Eur Neurosurg. 2014. PMID: 23636911
-
Robotic and robot-assisted skull base neurosurgery: systematic review of current applications and future directions.Neurosurg Focus. 2022 Jan;52(1):E15. doi: 10.3171/2021.10.FOCUS21505. Neurosurg Focus. 2022. PMID: 34973668
-
Evaluation of a neurosurgical robotic system to make accurate burr holes.Int J Med Robot. 2011 Mar;7(1):101-6. doi: 10.1002/rcs.376. Epub 2011 Jan 11. Int J Med Robot. 2011. PMID: 21341368
-
Robotic Applications in Cranial Neurosurgery: Current and Future.Oper Neurosurg. 2021 Nov 15;21(6):371-379. doi: 10.1093/ons/opab217. Oper Neurosurg. 2021. PMID: 34192764 Review.
-
A Haptic Guided Robotic System for Endoscope Positioning and Holding.Turk Neurosurg. 2015;25(4):601-7. doi: 10.5137/1019-5149.JTN.13290-1. Turk Neurosurg. 2015. PMID: 26242338
Cited by
-
Robotic surgery in Italy national survey (2011).Updates Surg. 2013 Mar;65(1):1-9. doi: 10.1007/s13304-012-0190-z. Epub 2012 Dec 8. Updates Surg. 2013. PMID: 23224637
References
-
- Howe RD, Matsuoka Y. Robotics for surgery. Annu Rev Biomed Eng. 1999;1:211–240. - PubMed
-
- Louw DF, Fielding T, McBeth PB, Gregoris D, Newhook P, Sutherland GR. Surgical robotics: A review and neurosurgical prototype development. Neurosurgery. 2004;54(3):525–537. - PubMed
-
- Mc Beth PB, Louw DF, Rizun PR, Sutherland GR. Robotics in neurosurgery. Am J Surg. 2004;188(4):68–75. - PubMed
-
- Giorgi C, Eisenberg H, Costi G, Gallo E, Garibotto G, Casolina DS. Robot-assisted microscope for neurosurgery. J Image Guid Surg. 1995;1(3):158–163. - PubMed
-
- Hongo K, Goto T, Kakizawa Y, Koyama J, Kawai T, Kan K, et al. Micromanipulator system (NeuRobot): Clinical application in neurosurgery. Int Congr Ser. 2003;1256:509–513.
LinkOut - more resources
Full Text Sources
Miscellaneous