

Kalman-filter-based orientation determination using inertial/magnetic sensors: observability analysis and performance evaluation
- PMID: 22163689
- PMCID: PMC3231259
- DOI: 10.3390/s111009182
Kalman-filter-based orientation determination using inertial/magnetic sensors: observability analysis and performance evaluation
Abstract
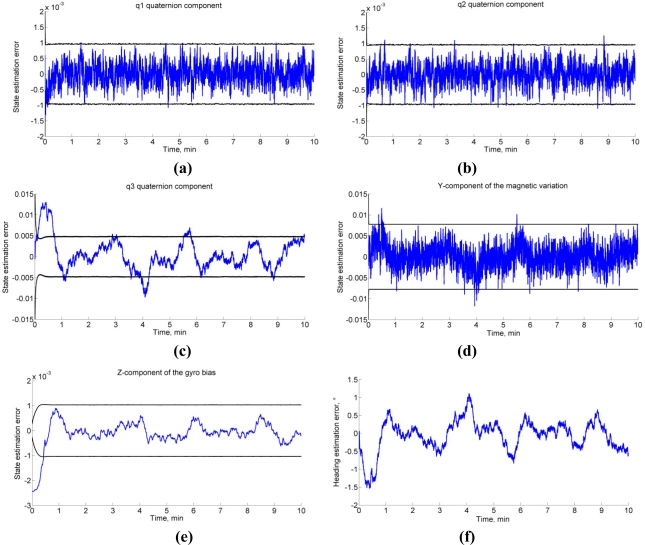
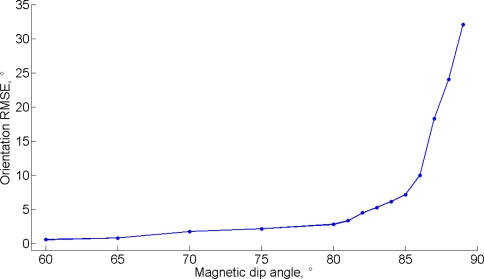
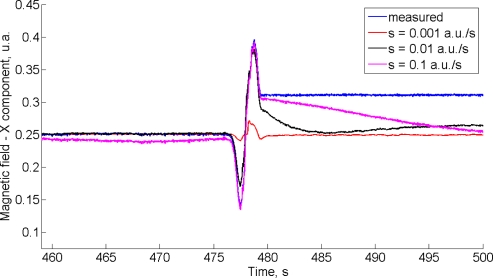
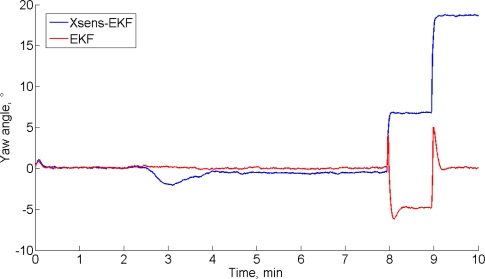
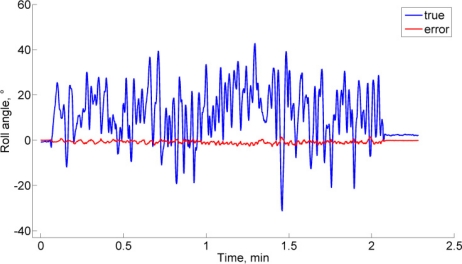
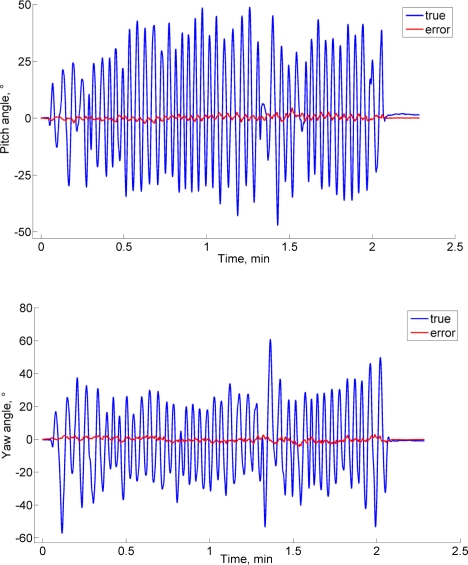
In this paper we present a quaternion-based Extended Kalman Filter (EKF) for estimating the three-dimensional orientation of a rigid body. The EKF exploits the measurements from an Inertial Measurement Unit (IMU) that is integrated with a tri-axial magnetic sensor. Magnetic disturbances and gyro bias errors are modeled and compensated by including them in the filter state vector. We employ the observability rank criterion based on Lie derivatives to verify the conditions under which the nonlinear system that describes the process of motion tracking by the IMU is observable, namely it may provide sufficient information for performing the estimation task with bounded estimation errors. The observability conditions are that the magnetic field, perturbed by first-order Gauss-Markov magnetic variations, and the gravity vector are not collinear and that the IMU is subject to some angular motions. Computer simulations and experimental testing are presented to evaluate the algorithm performance, including when the observability conditions are critical.
Keywords: Extended Kalman filter; Lie derivatives; ambulatory human motion tracking; inertial measurement unit; observability of nonlinear systems; orientation determination.
Figures
References
-
- Welch GF, Foxlin E. Motion tracking: No silver bullet, but a respectable arsenal. IEEE Comput. Graph. Appl. 2002;22:24–38.
-
- Sabatini AM. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006;53:1346–1356. - PubMed
-
- Yun X, Bachmann ER, McGhee RB. A simplified quaternion-based algorithm for orientation estimation from earth gravity and magnetic field measurements. IEEE Trans. Instrum. Meas. 2008;57:638–650.
-
- Lee JK, Park EJ. A fast quaternion-based orientation optimizer via virtual rotation for human motion tracking. IEEE Trans. Biomed. Eng. 2009;56:1574–1582. - PubMed
-
- Veltink PH, Bussmann HBJ, de Vries WHK, Martens WLJ, Van Lummel RC. Detection of static and dynamic activities using uniaxial accelerometers. IEEE Trans. Rehabil. Eng. 1996;4:375–385. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
