

PDR with a foot-mounted IMU and ramp detection
- PMID: 22163701
- PMCID: PMC3231264
- DOI: 10.3390/s111009393
PDR with a foot-mounted IMU and ramp detection
Abstract
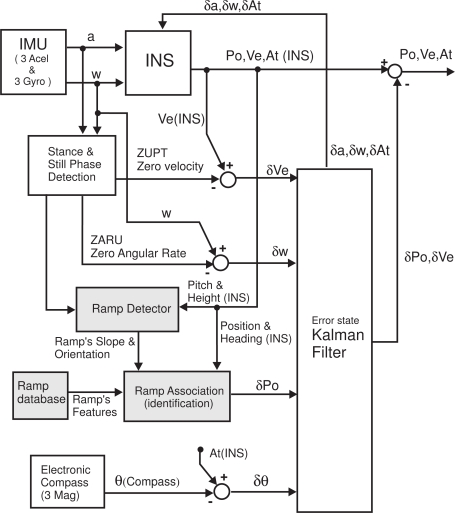
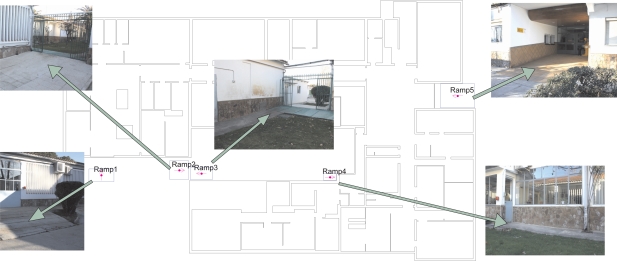
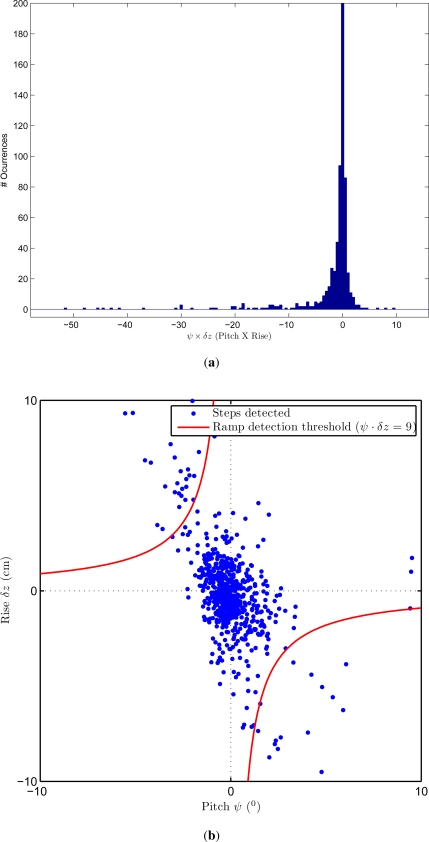
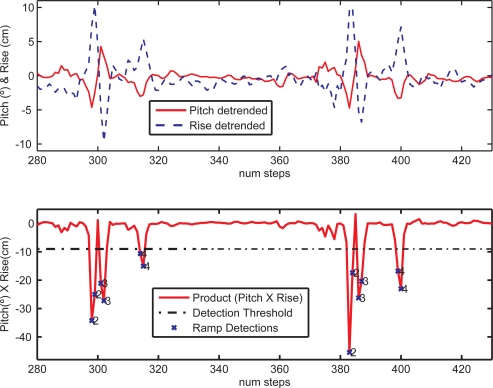
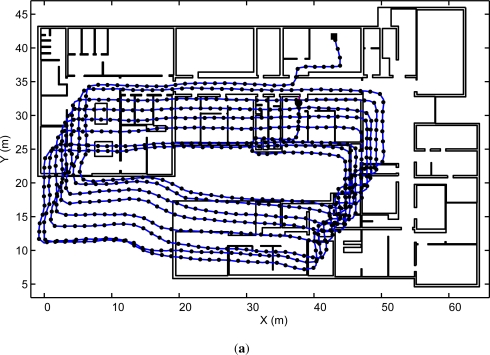
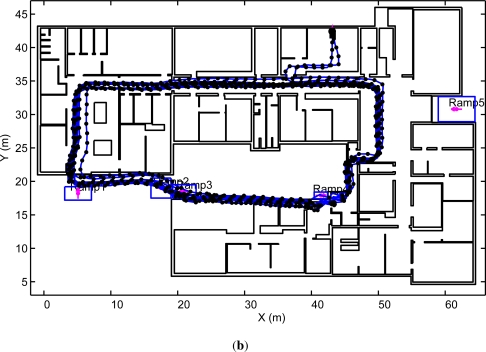
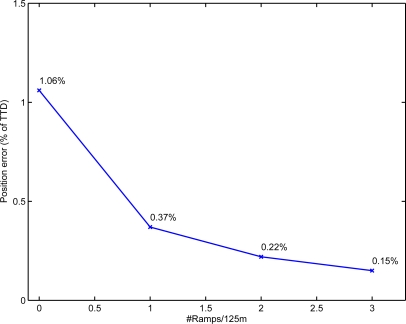
The localization of persons in indoor environments is nowadays an open problem. There are partial solutions based on the deployment of a network of sensors (Local Positioning Systems or LPS). Other solutions only require the installation of an inertial sensor on the person's body (Pedestrian Dead-Reckoning or PDR). PDR solutions integrate the signals coming from an Inertial Measurement Unit (IMU), which usually contains 3 accelerometers and 3 gyroscopes. The main problem of PDR is the accumulation of positioning errors due to the drift caused by the noise in the sensors. This paper presents a PDR solution that incorporates a drift correction method based on detecting the access ramps usually found in buildings. The ramp correction method is implemented over a PDR framework that uses an Inertial Navigation algorithm (INS) and an IMU attached to the person's foot. Unlike other approaches that use external sensors to correct the drift error, we only use one IMU on the foot. To detect a ramp, the slope of the terrain on which the user is walking, and the change in height sensed when moving forward, are estimated from the IMU. After detection, the ramp is checked for association with one of the existing in a database. For each associated ramp, a position correction is fed into the Kalman Filter in order to refine the INS-PDR solution. Drift-free localization is achieved with positioning errors below 2 meters for 1,000-meter-long routes in a building with a few ramps.
Keywords: drift elimination; indoor localization; inertial measureent unit (IMU); inertial navigation; pedestrian dead-reckoning; ramp detection.
Figures


References
-
- Jiménez A, Seco F, Prieto J, Roa J. Tecnologías sensoriales de localización para entornos inteligentes. I Congreso español de informática—Simposio de Computación Ubicua e Inteligencia Ambiental. International Symposium of Ubiquitous Computing and Ambient Intelligence; Granada, Spain. 14–16 September 2005; pp. 75–86.
-
- Hightower J, Borriello G. Location systems for ubiquitous computing. Computer. 2001;34:57–66.
-
- Ojeda L, Borenstein J. Personal Dead-reckoning System for GPS-denied Environments. Proceedings of the IEEE International Workshop on Safety, Security and Rescue Robotics; Rome, Italy. 27–29 September 2007; pp. 1–6.
-
- Stirling R. University of Alberta; Edmonton, AB, Canada: 2004. Development of a Pedestrian Navigation System Using Shoe Mounted Sensors. PhD Thesis,
-
- Woodman OJ. An Introduction to Inertial Navigation. University of Cambridge; Cambridge, UK: 2007. Technical Report 03, Number 696.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
