

Assessment of joystick and wrist control in hand-held articulated laparoscopic prototypes
- PMID: 22234593
- PMCID: PMC3372775
- DOI: 10.1007/s00464-011-2138-7
Assessment of joystick and wrist control in hand-held articulated laparoscopic prototypes
Abstract
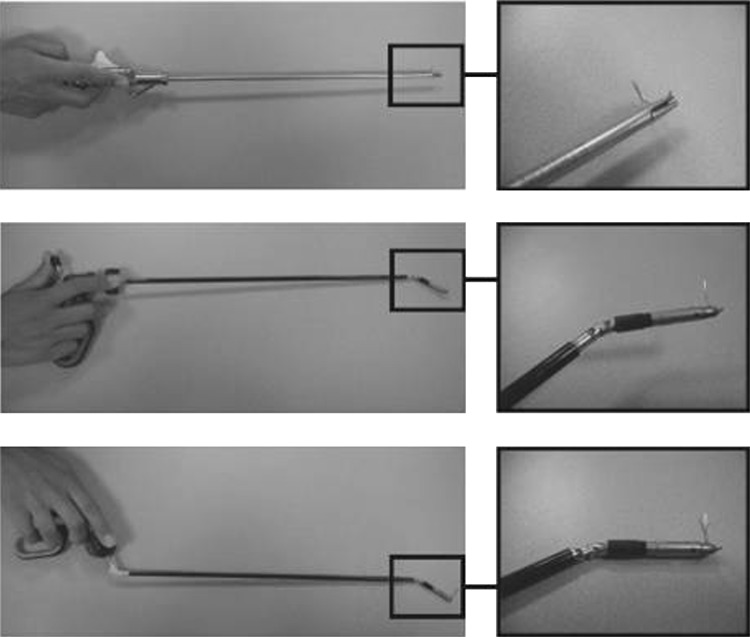
Background: Various steerable instruments with flexible distal tip have been developed for laparoscopic surgery. The problem of steering such instruments, however, remains a challenge, because no study investigated which control method is the most suitable. This study was designed to examine whether thumb (joystick) or wrist control method is designated for prototypes of steerable instruments by means of motion analysis.
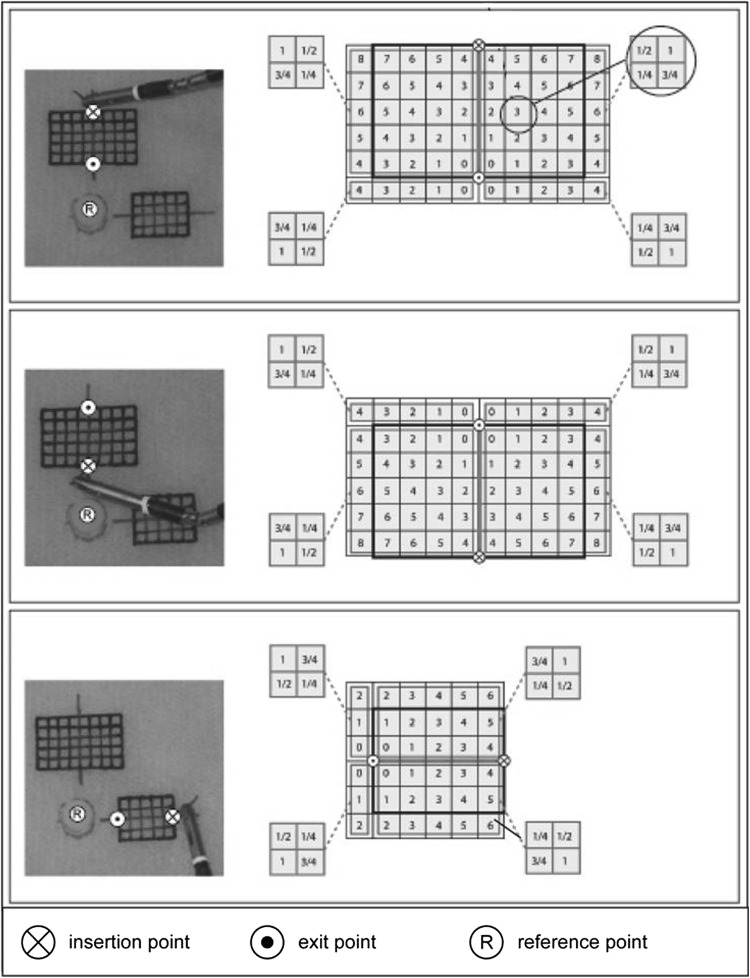
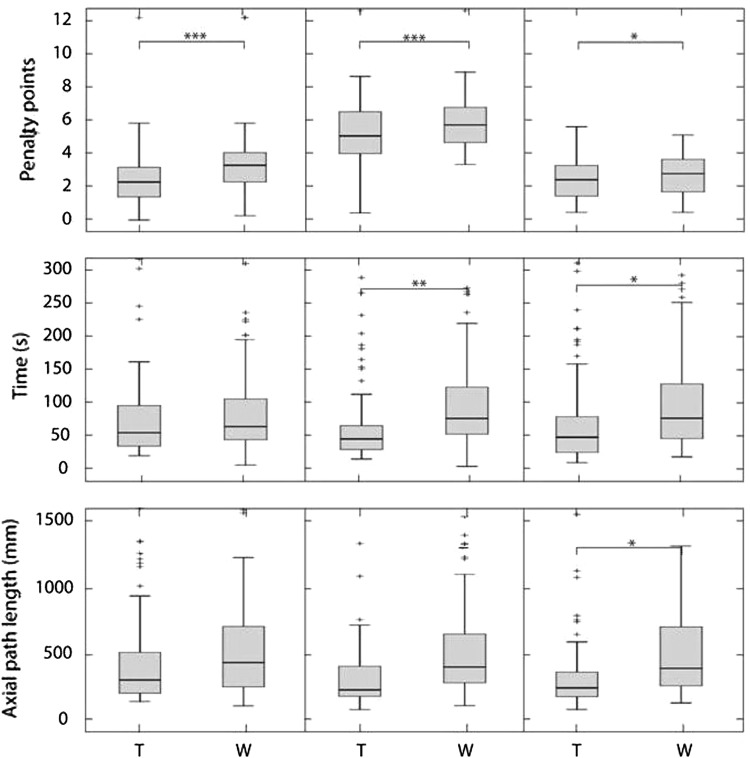
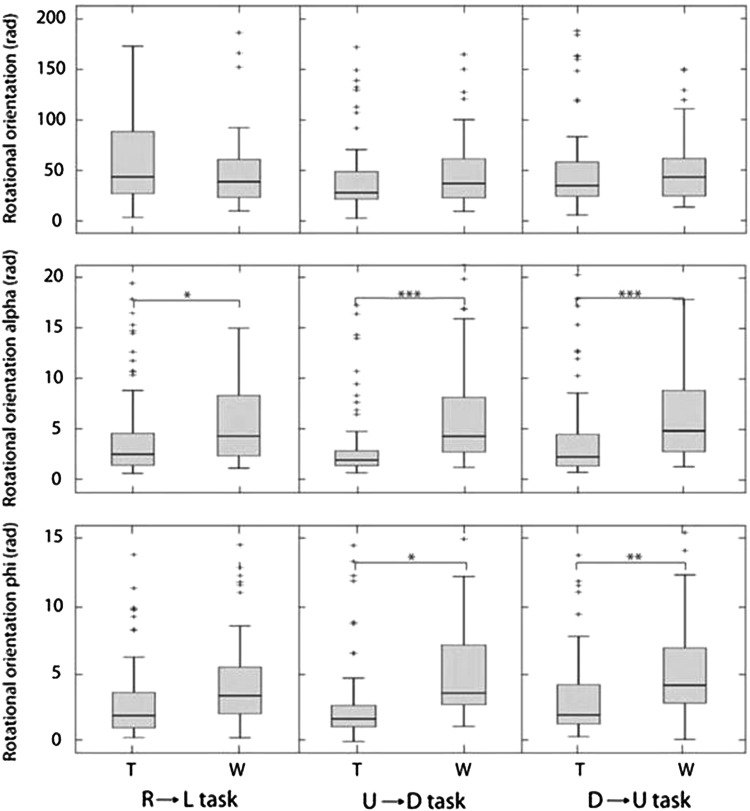
Methods: Five experts and 12 novices participated. Each participant performed a needle-driving task in three directions (right → left, up → down, and down → up) with two prototypes (wrist and thumb) and a conventional instrument. Novices performed the tasks in three sessions, whereas experts performed one session only. The order of performing the tasks was determined by Latin squares design. Assessment of performance was done by means of five motion analysis parameters, a newly developed matrix for assigning penalty points, and a questionnaire.
Results: The thumb-controlled prototype outperformed the wrist-controlled prototype. Comparison of the results obtained in each task showed that regarding penalty points, the up → down task was the most difficult to perform.
Conclusions: The thumb control is more suitable for steerable instruments than the wrist control. To avoid uncontrolled movements and difficulties with applying forces to the tissue while keeping the tip of the instrument at the constant angle, adding a "locking" feature is necessary. It is advisable not to perform the needle driving task in the up → down direction.
Figures


References
-
- Dankelman J, Grimbergen CA, Stassen HG. Engineering for patient safety (issues in minimally invasive procedures) London: Lawrence Erlbaum; 2005.
-
- Cuschieri A (2005) Laparoscopic surgery: current status, issues and future developments. Surgeon 3:125–130, 132–133, 135–138 - PubMed
-
- Frede T, Stock C, Rassweiler MD, Alken P. Retroperitoneoscopic and laparoscopic suturing: tips and strategies for improving efficiency. J Endourol. 2000;19:230–238. - PubMed
-
- Emam TA, Hanna G, Cuschieri A. Ergonomic principles of task alignment, visual display, and direction of execution of laparoscopic bowel suturing. Surg Endosc. 2002;16:267–271. - PubMed
-
- Waseda M, Inaki N, Torres Bermudez JR, Manukyan G, Gacek IA, Schurr MO, Braun M, Buess GF. Precision in stitches: radius surgical system. Surg Endosc. 2007;21:2056–2062. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
