

Somatosensory control of balance during locomotion in decerebrated cat
- PMID: 22236709
- PMCID: PMC3331606
- DOI: 10.1152/jn.00730.2011
Somatosensory control of balance during locomotion in decerebrated cat
Abstract
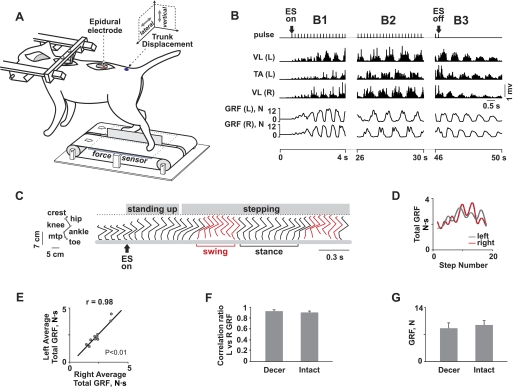
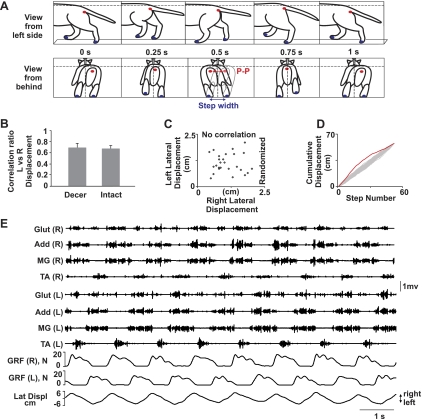
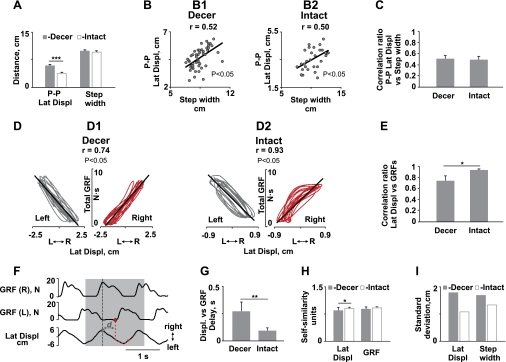
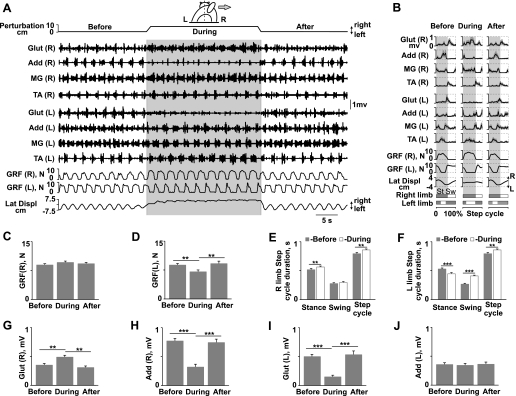
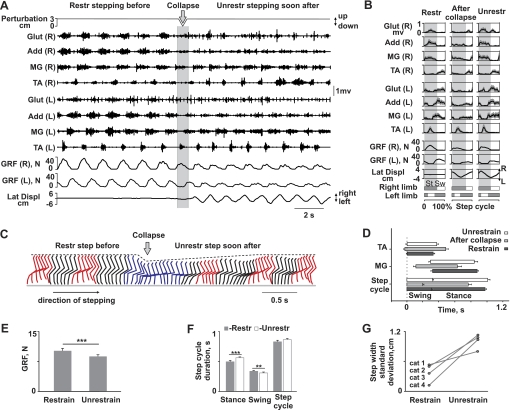
Postmammillary decerebrated cats can generate stepping on a moving treadmill belt when the brain stem or spinal cord is stimulated tonically and the hindquarters are supported both vertically and laterally. While adequate propulsion seems to be generated by the hindlimbs under these conditions, the ability to sustain equilibrium during locomotion has not been examined extensively. We found that tonic epidural spinal cord stimulation (5 Hz at L5) of decerebrated cats initiated and sustained unrestrained weight-bearing hindlimb stepping for extended periods. Detailed analyses of the relationships among hindlimb muscle EMG activity and trunk and limb kinematics and kinetics indicated that the motor circuitries in decerebrated cats actively maintain equilibrium during walking, similar to that observed in intact animals. Because of the suppression of vestibular, visual, and head-neck-trunk sensory input, balance-related adjustments relied entirely on the integration of somatosensory information arising from the moving hindquarters. In addition to dynamic balance control during unperturbed locomotion, sustained stepping could be reestablished rapidly after a collapse or stumble when the hindquarters switched from a restrained to an unrestrained condition. Deflecting the body by pulling the tail laterally induced adaptive modulations in the EMG activity, step cycle features, and left-right ground reaction forces that were sufficient to maintain lateral stability. Thus the brain stem-spinal cord circuitry of decerebrated cats in response to tonic spinal cord stimulation can control dynamic balance during locomotion using only somatosensory input.
Figures
References
-
- Armstrong DM. Supraspinal contributions to initiation and control of locomotion in the cat. Prog Neurobiol 26: 273–361, 1986 - PubMed
-
- Arshavsky YI, Gelfand IM, Orlovsky GN. The cerebellum and control of rhythmical movements. Trends Neurosci 6: 417–422, 1983
-
- Barbeau H, Rossignol S. Recovery of locomotion after chronic spinalization in the adult cat. Brain Res 412: 84–95, 1987 - PubMed
-
- Barberini CL, Macpherson JM. Effect of head position on postural orientation and equilibrium. Exp Brain Res 122: 175–184, 1998 - PubMed
-
- Bard P, Macht MB. The behavior of chronically decerebrate cats. In: Neurological Basis of Behavior, edited by Wolstenholme GEW, O'Connor CM. London: Churchill, 1958, p. 55–71
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous