

A special purpose embedded system for neural machine interface for artificial legs
- PMID: 22255511
- PMCID: PMC3676650
- DOI: 10.1109/IEMBS.2011.6091288
A special purpose embedded system for neural machine interface for artificial legs
Abstract
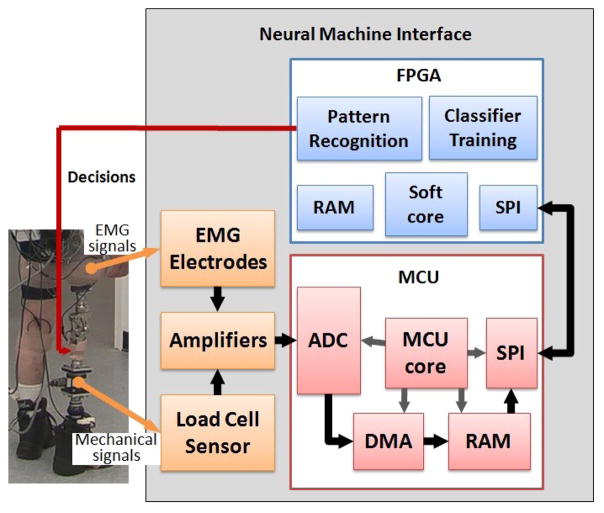
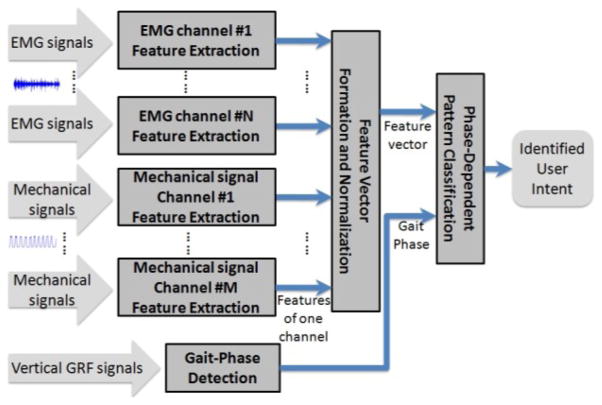
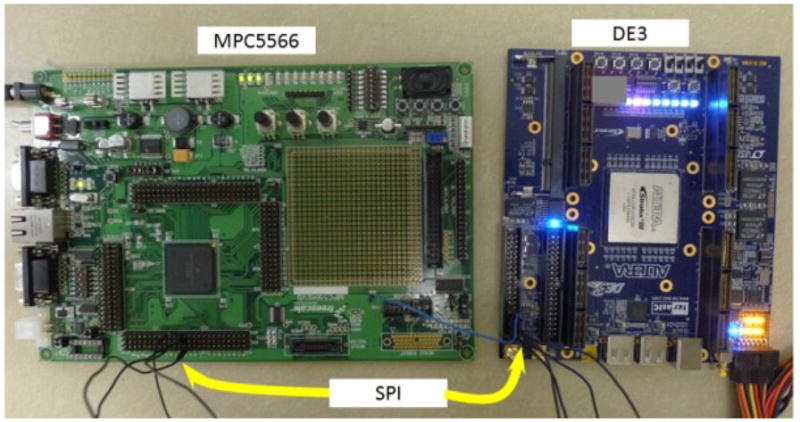
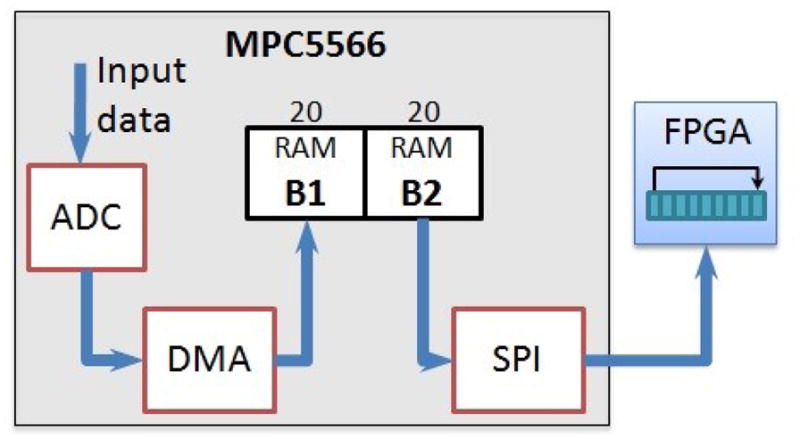
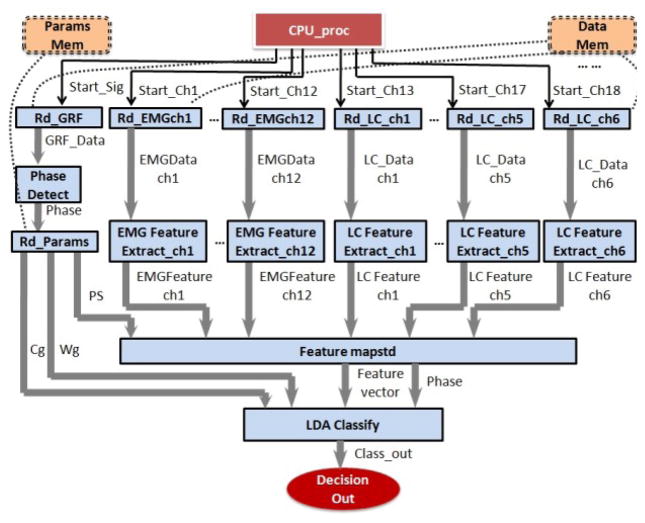
This paper presents a design and implementation of a neural-machine interface (NMI) for artificial legs that can decode amputee's intended movement in real time. The newly designed NMI integrates an FPGA chip for fast processing and a microcontroller unit (MCU) with multiple on-chip analog-to-digital converters (ADCs) for real-time data sampling. The resulting embedded system is able to sample in real time 12 EMG signals and 6 mechanical signals and execute a special complex phase-dependent classifier for accurate recognition of the user's intended locomotion modes. The implementation and evaluation are based on Altera's Stratix III 3S150 FPGA device coupled with Freescale's MPC5566 MCU. The experimental results for classifying three locomotion modes (level-ground walking, stairs ascent, and stairs descent) based on data collected from an able-bodied human subject have shown acceptable performance for real-time controlling of artificial legs.
Figures
References
-
- Parker PA, Scott RN. Myoelectric control of prostheses. Critical reviews in biomedical engineering. 1986:283–310. - PubMed
-
- Englehart K, Hudgins B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans Biomed Eng. 2003:848–854. - PubMed
-
- Zhang F, DiSanto W, Ren J, Dou Z, Yang Q, Huang H. A Novel CPS System for Evaluating a Neural-Machine Interface for Artificial Legs. presented at ICCPS’11; Chicago, USA. April 2011.
-
- Huang H, Sun Y, Yang Q, Zhang F, Zhang X, Liu Y, Ren J, Sierra F. Integrating neuromuscular and cyber systems for neural control of artificial legs. ICCPS’10; Stockholm, Sweden. April 2010.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical