

Algorithms for Design of Continuum Robots Using the Concentric Tubes Approach: A Neurosurgical Example
- PMID: 22270831
- PMCID: PMC3262313
- DOI: 10.1109/ICRA.2011.5980311
Algorithms for Design of Continuum Robots Using the Concentric Tubes Approach: A Neurosurgical Example
Abstract
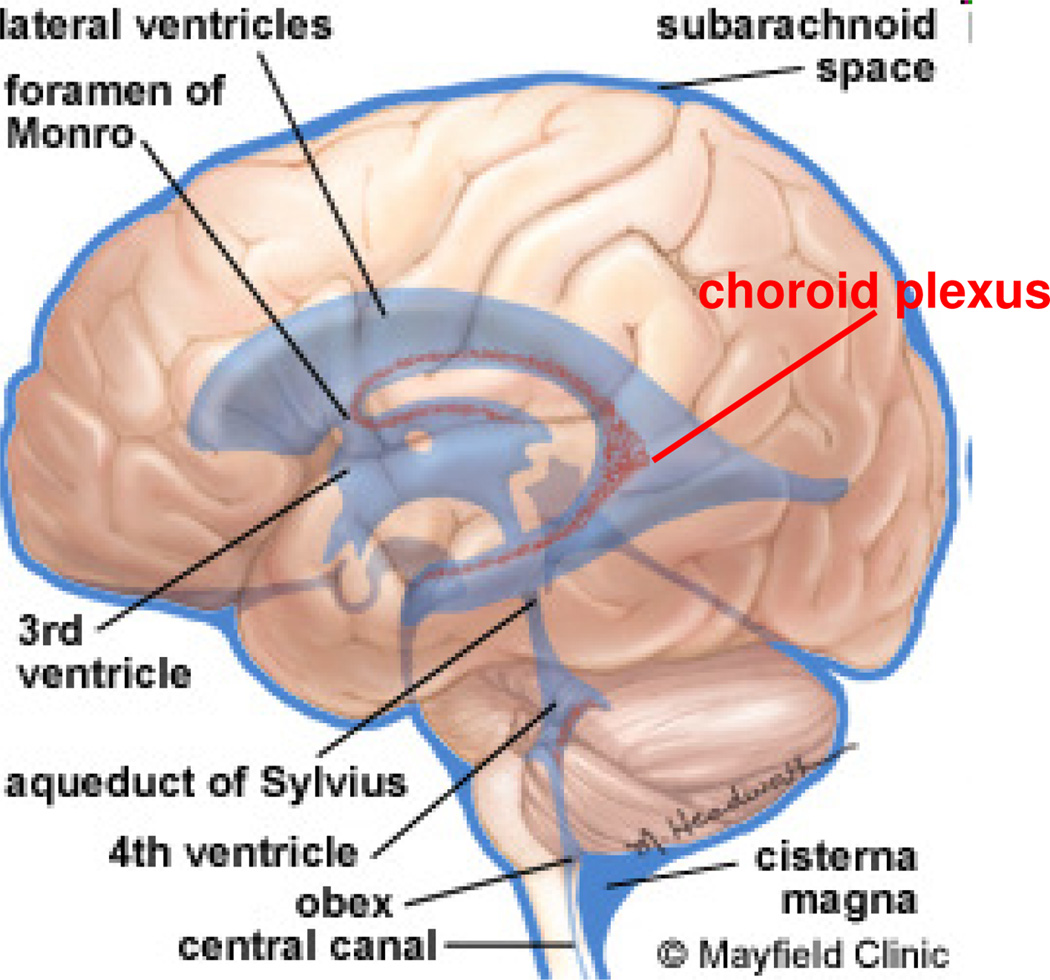
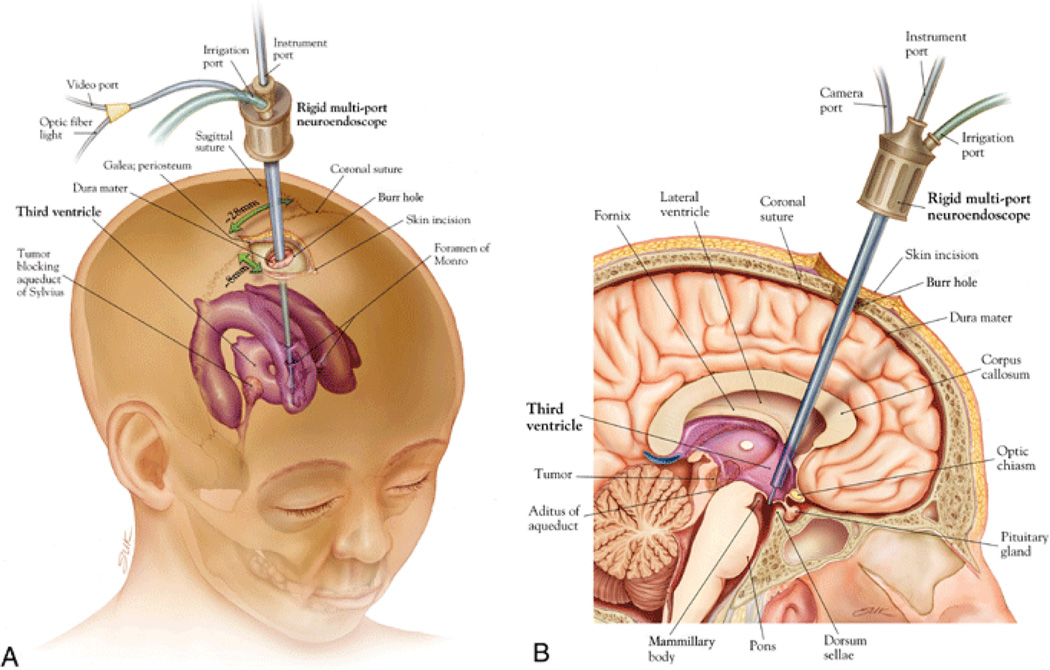
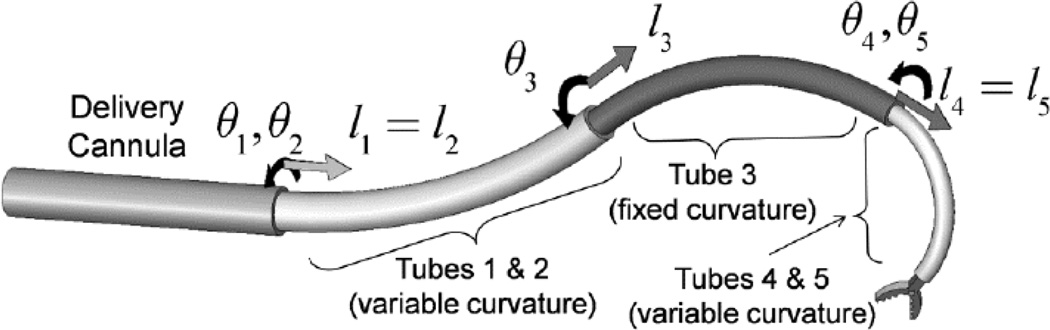
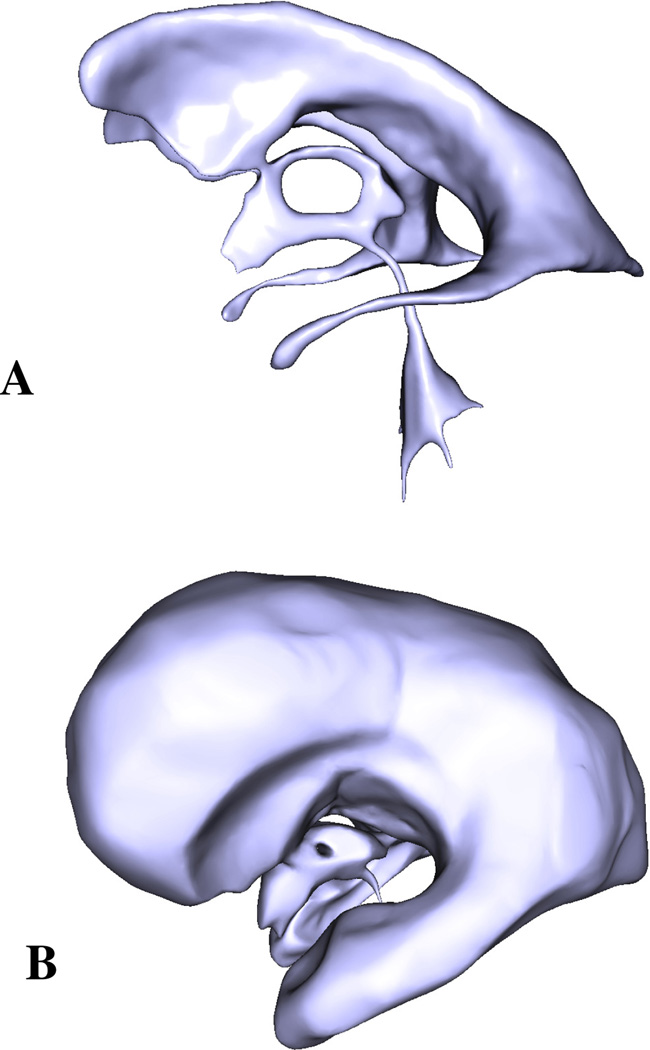
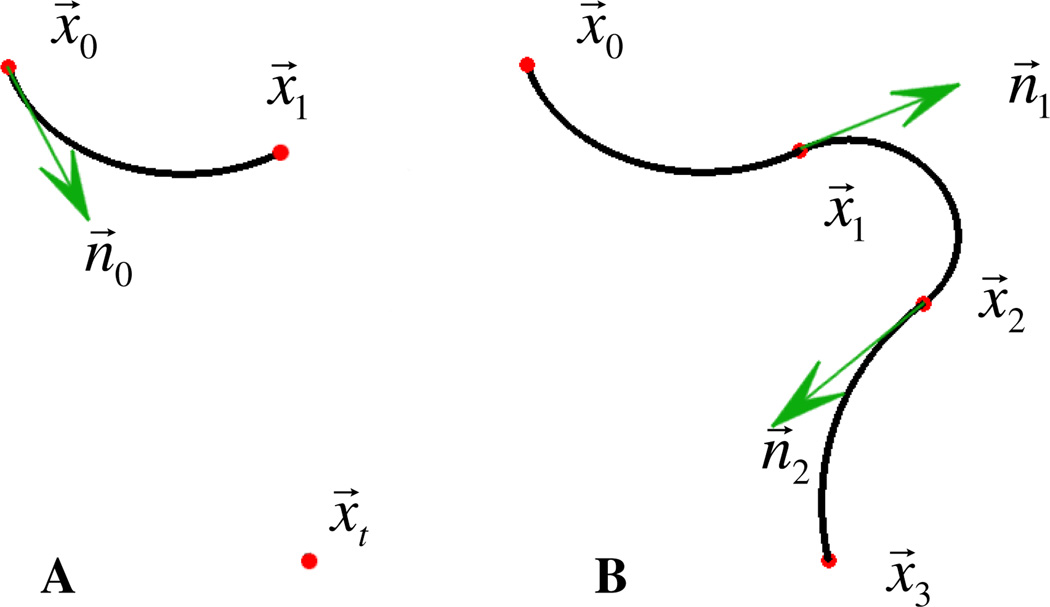
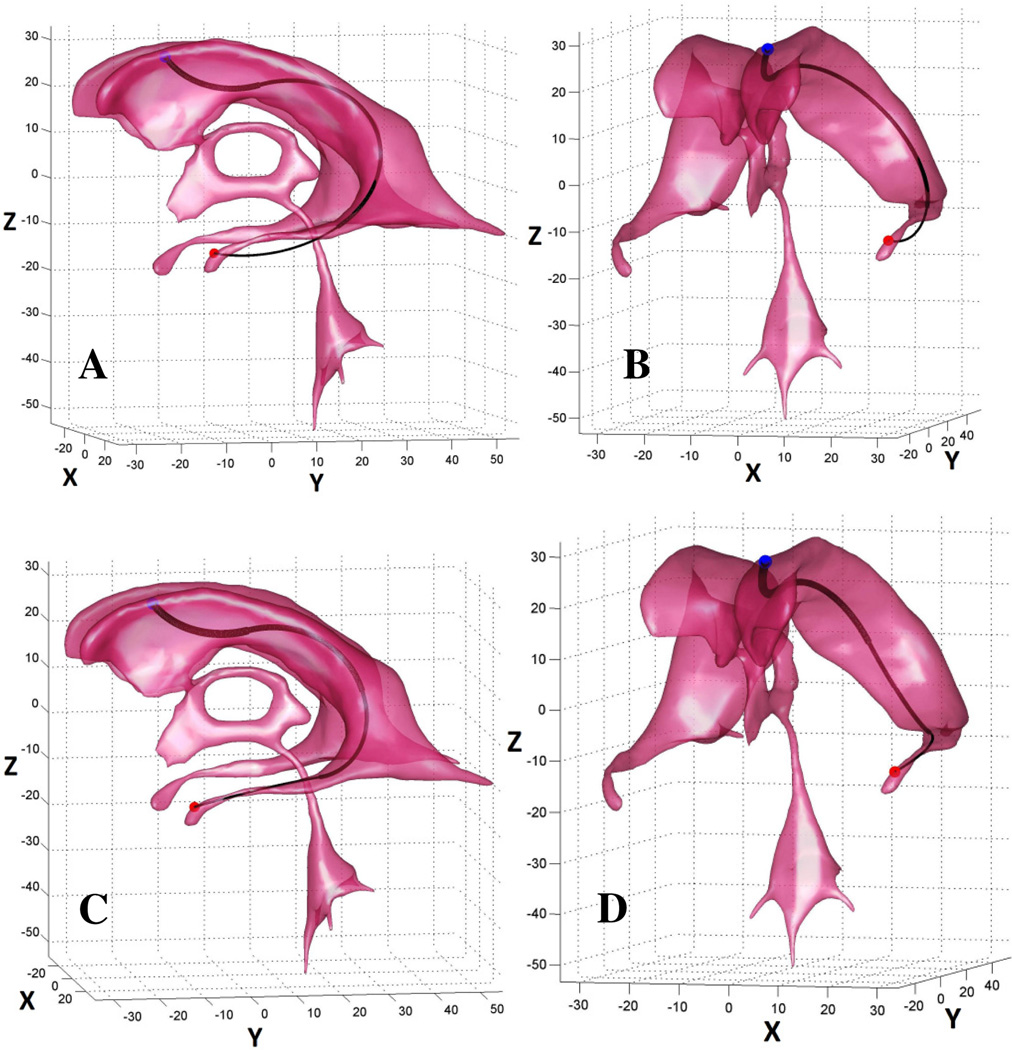
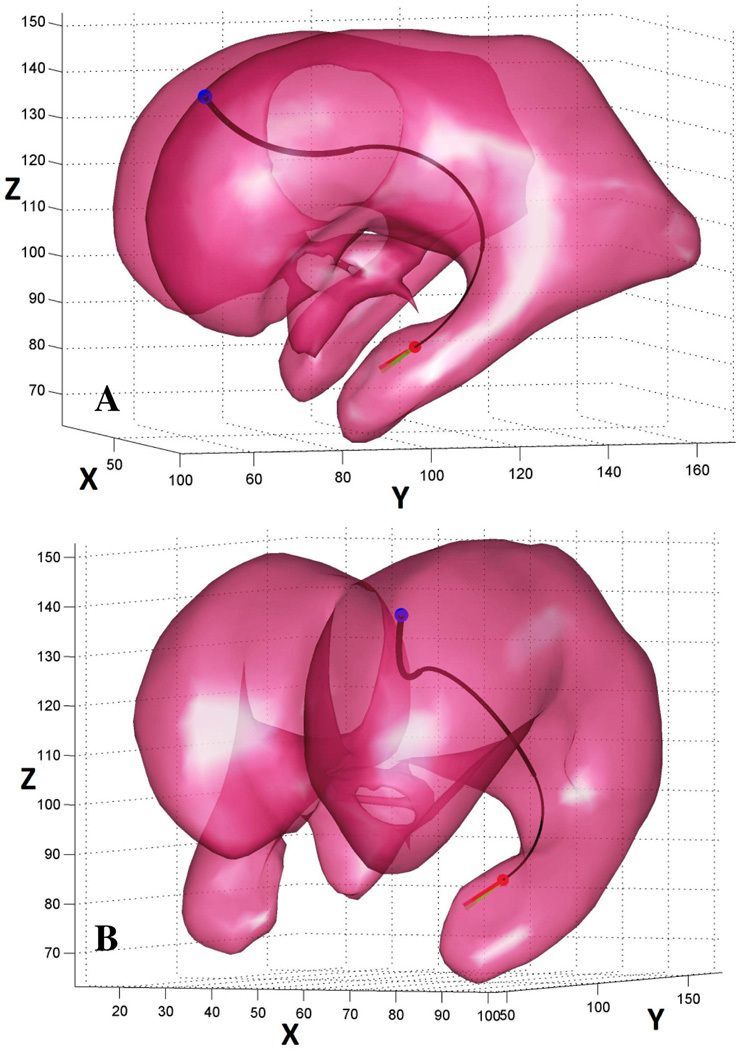
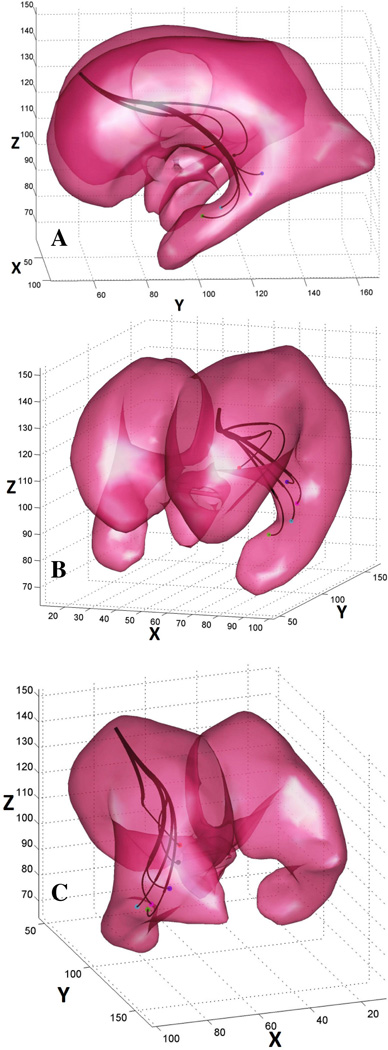
We propose a novel systematic approach to optimizing the design of concentric tube robots for neurosurgical procedures. These procedures require that the robot approach specified target sites while navigating and operating within an anatomically constrained work space. The availability of preoperative imaging makes our approach particularly suited for neurosurgery, and we illustrate the method with the example of endoscopic choroid plexus ablation. A novel parameterization of the robot characteristics is used in conjunction with a global pattern search optimization method. The formulation returns the design of the least-complex robot capable of reaching single or multiple target points in a confined space with constrained optimization metrics. A particular advantage of this approach is that it identifies the need for either fixed-curvature versus variable-curvature sections. We demonstrate the performance of the method in four clinically relevant examples.
Figures
References
-
- Dimaio SP, Archip N, Hata N, Talos IF, Warfield SK, Majumdar A, Mcdannold N, Hynynen K, Morrison PR, Wells WM, 3rd, Kacher DF, Ellis RF, Golby AJ, Black PM, Jolesz FA, Kikinis R. Image-guided neurosurgery at Brigham and Women's Hospital. IEEE Eng Med Biol Mag. 2006 Sep–Oct;25(5):67–73. - PubMed
-
- Hall WA, Truwit CL. Intraoperative MR-guided neurosurgery. Neurosurgery. 2008 Jun;62(6) Suppl 3:1555–1579. discussion 1579–82. - PubMed
-
- Elder JB, Hoh DJ, Oh BC, Heller AC, Liu CY, Apuzzo ML. The future of cerebral surgery: a kaleidoscope of opportunities. Neurosurgery. 2008 Jun;62(6) Suppl 3:1555–1579. discussion 1579–82. - PubMed
-
- Eljamel MS. Robotic neurological surgery applications: accuracy and consistency or pure fantasy? Stereotactic Funct .Neurosurg. 2009;87(2):88–93. - PubMed
-
- Warf BC. Endoscopic third ventriculostomy and choroid plexus cauterization for pediatric hydrocephalus. Clin Neurosurg. 2007;54:78–82. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources