

Telerobotic-assisted bone-drilling system using bilateral control with feed operation scaling and cutting force scaling
- PMID: 22271710
- PMCID: PMC3440596
- DOI: 10.1002/rcs.457
Telerobotic-assisted bone-drilling system using bilateral control with feed operation scaling and cutting force scaling
Abstract
Background: Drilling is used in the medical field, especially in oral surgery and orthopaedics. In recent years, oral surgery involving dental implants has become more common. However, the risky drilling process causes serious accidents. To prevent these accidents, supporting systems such as robotic drilling systems are required.
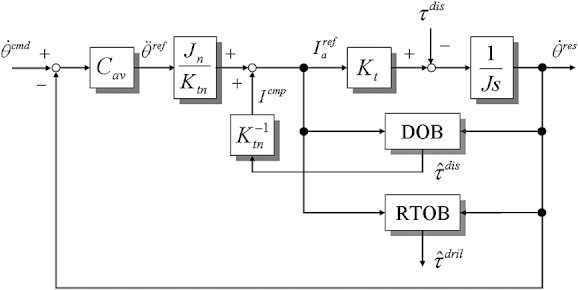
Methods: A telerobotic-assisted drilling system is proposed. An acceleration-based four-channel bilateral control system is implemented in linear actuators in a master-slave system for drill feeding. A reaction force observer is used instead of a force sensor for measuring cutting force. Cutting force transmits from a cutting material to a surgeon, who may feel a static cutting resistance force and vigorous cutting vibrations, via the master-slave system. Moreover, position scaling and force scaling are achieved. Scaling functions are used to achieve precise drilling and hazard detection via force sensation.
Results: Cutting accuracy and reproducibility of the cutting force were evaluated by angular velocity/position error and frequency analysis of the cutting force, respectively, and errors were > 2.0 rpm and > 0.2 mm, respectively. Spectrum peaks of the cutting vibration were at the theoretical vibration frequencies of 30, 60 and 90 Hz.
Conclusions: The proposed telerobotic-assisted drilling system achieved precise manipulation of the drill feed and vivid feedback from the cutting force.
Copyright © 2012 John Wiley & Sons, Ltd.
Figures












References
-
- Meffert RM, Langer B, Fritz ME. Dental implants: a review. J Periodontol. 1992;63(11):859–870. - PubMed
-
- Verstreken K, Van Cleynenbreugel J, Martens K, et al. An image-guided planning system for endosseous oral implants. IEEE Trans Med Imag. 1998;17(5):842–852. - PubMed
-
- Basdogan C, De S, Kim J, et al. Haptics in minimally invasive surgical simulation and training. IEEE Comput Graphics Appl. 2004;24(2):56–64. - PubMed
-
- Huettner F, Dynda D, Ryan M, et al. Robotic-assisted minimally invasive surgery; a useful tool in resident training – the Peoria experience, 2002–2009. Int J Med Robotics Comput Assist Surg. 2010;6(4):386–393. - PubMed
-
- Casap N, Wexler A, Lustmann J. Image-guided navigation system for placing dental implants. Compend Contin Ed Dent. 2004;25(10):783–784. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
