

From spinal central pattern generators to cortical network: integrated BCI for walking rehabilitation
- PMID: 22272380
- PMCID: PMC3261492
- DOI: 10.1155/2012/375148
From spinal central pattern generators to cortical network: integrated BCI for walking rehabilitation
Abstract
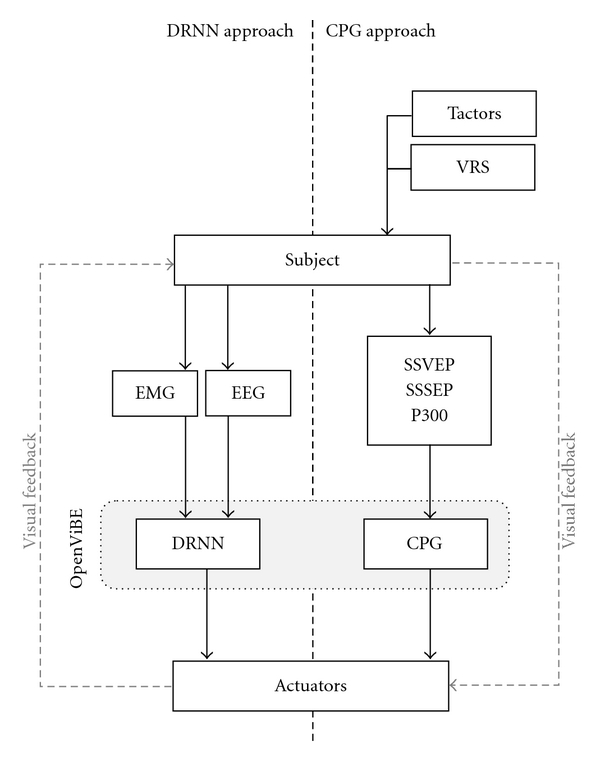
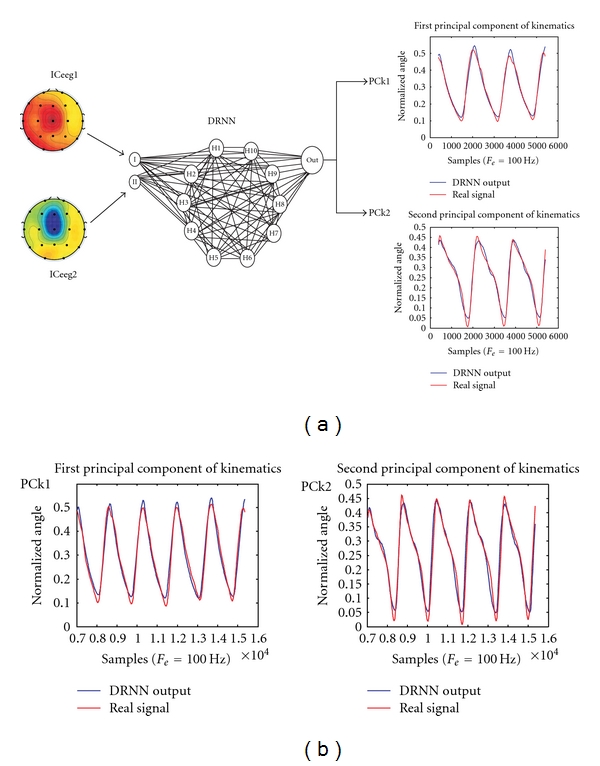
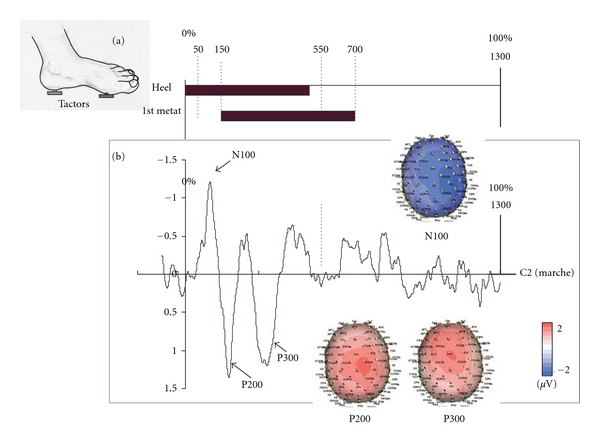
Success in locomotor rehabilitation programs can be improved with the use of brain-computer interfaces (BCIs). Although a wealth of research has demonstrated that locomotion is largely controlled by spinal mechanisms, the brain is of utmost importance in monitoring locomotor patterns and therefore contains information regarding central pattern generation functioning. In addition, there is also a tight coordination between the upper and lower limbs, which can also be useful in controlling locomotion. The current paper critically investigates different approaches that are applicable to this field: the use of electroencephalogram (EEG), upper limb electromyogram (EMG), or a hybrid of the two neurophysiological signals to control assistive exoskeletons used in locomotion based on programmable central pattern generators (PCPGs) or dynamic recurrent neural networks (DRNNs). Plantar surface tactile stimulation devices combined with virtual reality may provide the sensation of walking while in a supine position for use of training brain signals generated during locomotion. These methods may exploit mechanisms of brain plasticity and assist in the neurorehabilitation of gait in a variety of clinical conditions, including stroke, spinal trauma, multiple sclerosis, and cerebral palsy.
Figures


Similar articles
-
The influence of walking-aids on the plasticity of spinal interneuronal networks, central-pattern-generators and the recovery of gait post-stroke. A literature review and scholarly discussion.J Bodyw Mov Ther. 2017 Apr;21(2):422-434. doi: 10.1016/j.jbmt.2016.09.012. Epub 2016 Sep 30. J Bodyw Mov Ther. 2017. PMID: 28532887 Review.
-
Induction of locomotor-like EMG activity in paraplegic persons by orthotic gait training.Exp Brain Res. 2004 Jul;157(1):117-23. doi: 10.1007/s00221-003-1826-5. Epub 2004 Feb 17. Exp Brain Res. 2004. PMID: 14968281 Clinical Trial.
-
The mammalian central pattern generator for locomotion.Brain Res Rev. 2009 Dec 11;62(1):45-56. doi: 10.1016/j.brainresrev.2009.08.002. Epub 2009 Aug 29. Brain Res Rev. 2009. PMID: 19720083 Review.
-
Rehabilitation of locomotion after spinal cord injury.Restor Neurol Neurosci. 2010;28(1):123-34. doi: 10.3233/RNN-2010-0508. Restor Neurol Neurosci. 2010. PMID: 20086289 Review.
-
A new model of the spinal locomotor networks of a salamander and its properties.Biol Cybern. 2018 Aug;112(4):369-385. doi: 10.1007/s00422-018-0759-9. Epub 2018 May 22. Biol Cybern. 2018. PMID: 29790009
Cited by
-
EEG Spectral Generators Involved in Motor Imagery: A swLORETA Study.Front Psychol. 2017 Dec 12;8:2133. doi: 10.3389/fpsyg.2017.02133. eCollection 2017. Front Psychol. 2017. PMID: 29312028 Free PMC article.
-
Hybrid Brain-Computer Interface Techniques for Improved Classification Accuracy and Increased Number of Commands: A Review.Front Neurorobot. 2017 Jul 24;11:35. doi: 10.3389/fnbot.2017.00035. eCollection 2017. Front Neurorobot. 2017. PMID: 28790910 Free PMC article. Review.
-
Brain-Computer Interfaces Systems for Upper and Lower Limb Rehabilitation: A Systematic Review.Sensors (Basel). 2021 Jun 24;21(13):4312. doi: 10.3390/s21134312. Sensors (Basel). 2021. PMID: 34202546 Free PMC article.
-
A Dynamical Systems Approach to Characterizing Brain-Body Interactions during Movement: Challenges, Interpretations, and Recommendations.Sensors (Basel). 2023 Jul 11;23(14):6296. doi: 10.3390/s23146296. Sensors (Basel). 2023. PMID: 37514591 Free PMC article. Review.
-
Distinct β Band Oscillatory Networks Subserving Motor and Cognitive Control during Gait Adaptation.J Neurosci. 2016 Feb 17;36(7):2212-26. doi: 10.1523/JNEUROSCI.3543-15.2016. J Neurosci. 2016. PMID: 26888931 Free PMC article.
References
-
- Cheron G, Bengoetxea A, Bouillot E, Lacquaniti F, Dan B. Early emergence of temporal co-ordination of lower limb segments elevation angles in human locomotion. Neuroscience Letters. 2001;308(2):123–127. - PubMed
-
- Cheron G, Bouillot E, Dan B, Bengoetxea A, Draye JP, Lacquaniti F. Development of a kinematic coordination pattern in toddler locomotion: planar covariation. Experimental Brain Research. Experimentelle Hirnforschung. Expérimentation Cérébrale. 2001;137(3-4):455–466. - PubMed
-
- Ivanenko YP, Dominici N, Cappellini G, Dan B, Cheron G, Lacquaniti F. Development of pendulum mechanism and kinematic coordination from the first unsupported steps in toddlers. Journal of Experimental Biology. 2004;207(21):3797–3810. - PubMed
-
- Cheron G, Cebolla A, Leurs F, Bengoetxea A, Dan B. Motor Control and Learning. Birkhäuser; 2006. Development and motor control: from the first step on; pp. 127–139.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
