

Prototypical components of honeybee homing flight behavior depend on the visual appearance of objects surrounding the goal
- PMID: 22279431
- PMCID: PMC3260448
- DOI: 10.3389/fnbeh.2012.00001
Prototypical components of honeybee homing flight behavior depend on the visual appearance of objects surrounding the goal
Abstract
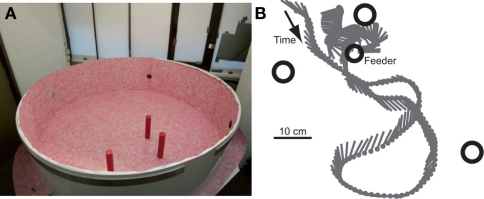
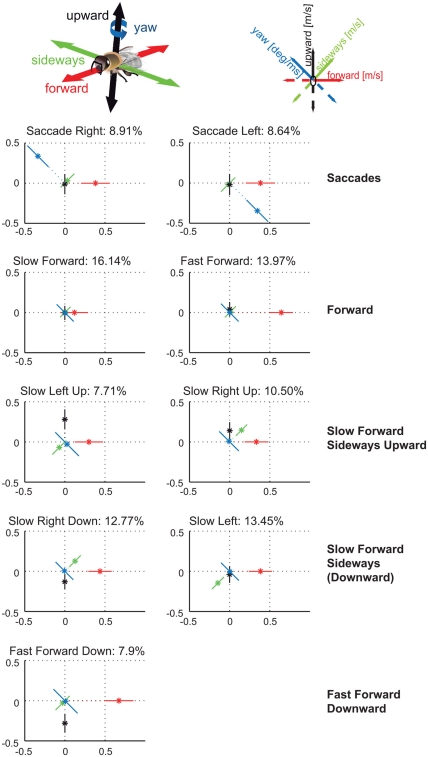
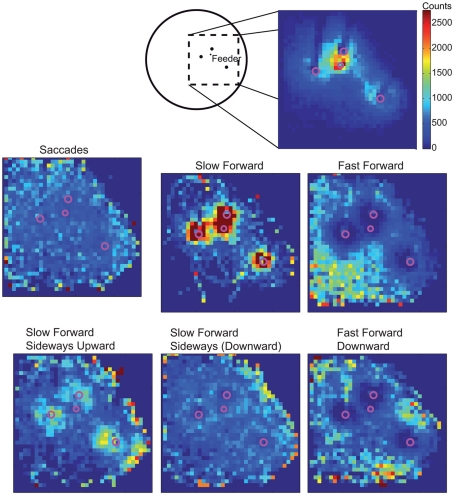
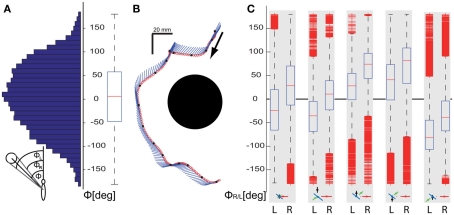
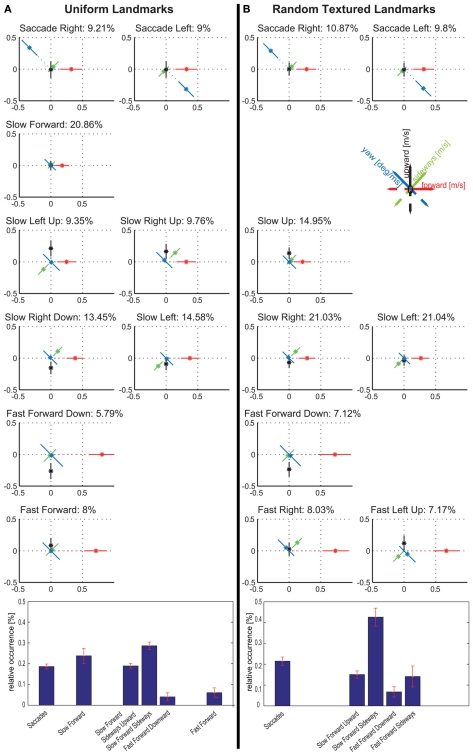
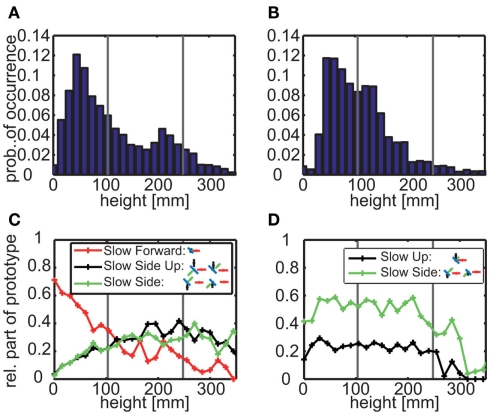
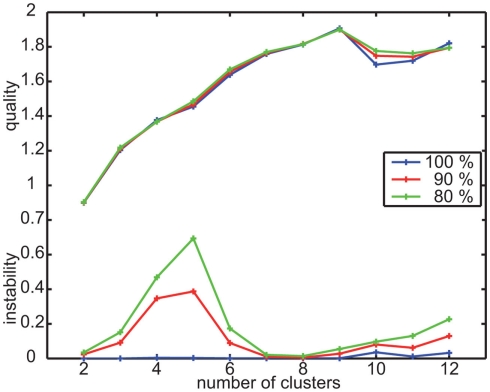
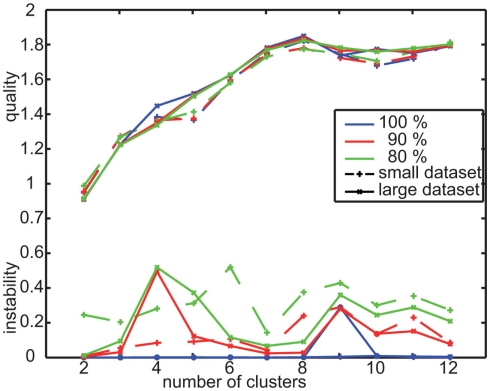
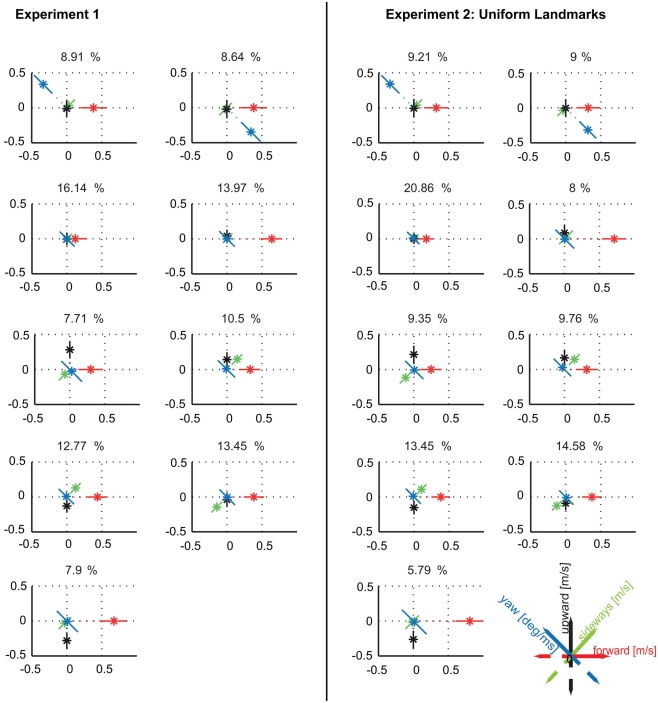
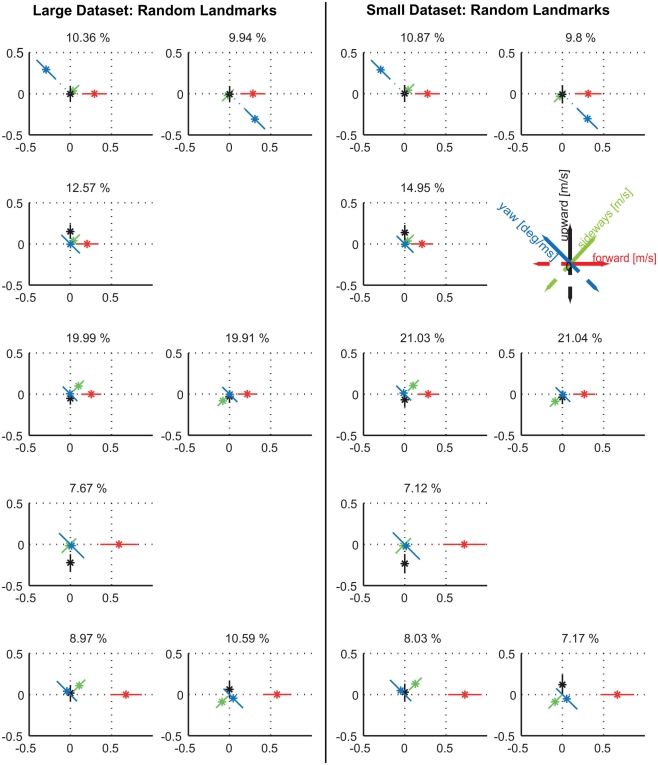
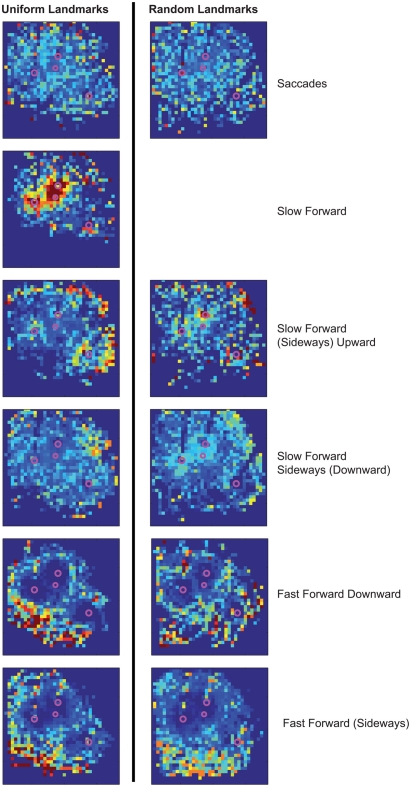
Honeybees use visual cues to relocate profitable food sources and their hive. What bees see while navigating, depends on the appearance of the cues, the bee's current position, orientation, and movement relative to them. Here we analyze the detailed flight behavior during the localization of a goal surrounded by cylinders that are characterized either by a high contrast in luminance and texture or by mostly motion contrast relative to the background. By relating flight behavior to the nature of the information available from these landmarks, we aim to identify behavioral strategies that facilitate the processing of visual information during goal localization. We decompose flight behavior into prototypical movements using clustering algorithms in order to reduce the behavioral complexity. The determined prototypical movements reflect the honeybee's saccadic flight pattern that largely separates rotational from translational movements. During phases of translational movements between fast saccadic rotations, the bees can gain information about the 3D layout of their environment from the translational optic flow. The prototypical movements reveal the prominent role of sideways and up- or downward movements, which can help bees to gather information about objects, particularly in the frontal visual field. We find that the occurrence of specific prototypes depends on the bees' distance from the landmarks and the feeder and that changing the texture of the landmarks evokes different prototypical movements. The adaptive use of different behavioral prototypes shapes the visual input and can facilitate information processing in the bees' visual system during local navigation.
Keywords: classification of behavior; honeybee local navigation; prototypical movements.
Figures
Similar articles
-
Visual motion-sensitive neurons in the bumblebee brain convey information about landmarks during a navigational task.Front Behav Neurosci. 2014 Sep 24;8:335. doi: 10.3389/fnbeh.2014.00335. eCollection 2014. Front Behav Neurosci. 2014. PMID: 25309374 Free PMC article.
-
The behavioral relevance of landmark texture for honeybee homing.Front Behav Neurosci. 2011 Apr 21;5:20. doi: 10.3389/fnbeh.2011.00020. eCollection 2011. Front Behav Neurosci. 2011. PMID: 21541258 Free PMC article.
-
The fine structure of honeybee head and body yaw movements in a homing task.Proc Biol Sci. 2010 Jun 22;277(1689):1899-906. doi: 10.1098/rspb.2009.2326. Epub 2010 Feb 10. Proc Biol Sci. 2010. PMID: 20147329 Free PMC article.
-
Optic flow-based collision-free strategies: From insects to robots.Arthropod Struct Dev. 2017 Sep;46(5):703-717. doi: 10.1016/j.asd.2017.06.003. Epub 2017 Jul 11. Arthropod Struct Dev. 2017. PMID: 28655645 Review.
-
The memory structure of navigation in honeybees.J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2015 Jun;201(6):547-61. doi: 10.1007/s00359-015-0987-6. Epub 2015 Feb 24. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2015. PMID: 25707351 Review.
Cited by
-
Bumblebees minimize control challenges by combining active and passive modes in unsteady winds.Sci Rep. 2016 Oct 18;6:35043. doi: 10.1038/srep35043. Sci Rep. 2016. PMID: 27752047 Free PMC article.
-
Impact of stride-coupled gaze shifts of walking blowflies on the neuronal representation of visual targets.Front Behav Neurosci. 2014 Sep 15;8:307. doi: 10.3389/fnbeh.2014.00307. eCollection 2014. Front Behav Neurosci. 2014. PMID: 25309362 Free PMC article.
-
Visual motion-sensitive neurons in the bumblebee brain convey information about landmarks during a navigational task.Front Behav Neurosci. 2014 Sep 24;8:335. doi: 10.3389/fnbeh.2014.00335. eCollection 2014. Front Behav Neurosci. 2014. PMID: 25309374 Free PMC article.
-
An Anatomically Constrained Model for Path Integration in the Bee Brain.Curr Biol. 2017 Oct 23;27(20):3069-3085.e11. doi: 10.1016/j.cub.2017.08.052. Epub 2017 Oct 5. Curr Biol. 2017. PMID: 28988858 Free PMC article.
-
Optic flow based spatial vision in insects.J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2023 Jul;209(4):541-561. doi: 10.1007/s00359-022-01610-w. Epub 2023 Jan 7. J Comp Physiol A Neuroethol Sens Neural Behav Physiol. 2023. PMID: 36609568 Free PMC article. Review.
References
-
- Baird E., Srinivasan M. V., Zhang S., Lamont R., Cowling A. (2006). “Visual control of flight speed and height in the honeybee,” in From Animals to Animats, Vol. 4095, ed. Nolfi S. (Berlin: Springer; ), 40–51
-
- Cartwright B., Collett T. (1983). Landmark learning in bees-experiments and models. J. Comp. Physiol. A 151, 521–54310.1007/BF00605469 - DOI
LinkOut - more resources
Full Text Sources