

Wearing a safety harness during treadmill walking influences lower extremity kinematics mainly through changes in ankle regularity and local stability
- PMID: 22305105
- PMCID: PMC3293035
- DOI: 10.1186/1743-0003-9-8
Wearing a safety harness during treadmill walking influences lower extremity kinematics mainly through changes in ankle regularity and local stability
Abstract
Background: Wearing a harness during treadmill walking ensures the subject's safety and is common practice in biomedical engineering research. However, the extent to which such practice influences gait is unknown. This study investigated harness-related changes in gait patterns, as evaluated from lower extremity kinematics during treadmill walking.
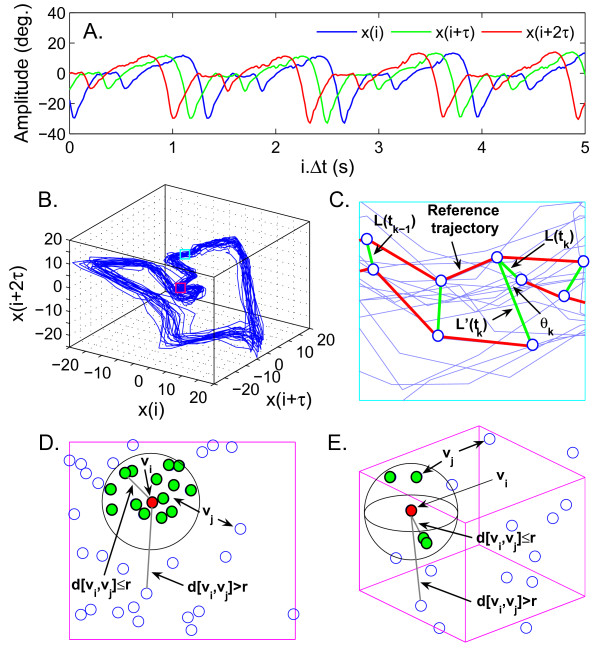
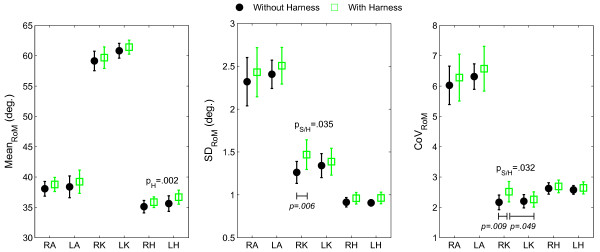
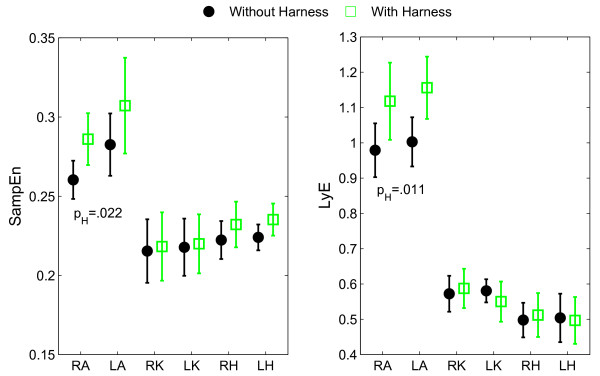
Findings: Healthy subjects (n = 10) walked on a treadmill at their preferred speed for 3 minutes with and without wearing a harness (LiteGait®, Mobility Research, Inc.). In the former condition, no weight support was provided to the subjects. Lower extremity kinematics was assessed in the sagittal plane from the mean (meanRoM), standard deviation (SDRoM) and coefficient of variation (CoVRoM) of the hip, knee, and ankle ranges of motion (RoM), as well as from the sample entropy (SampEn) and the largest Lyapunov exponent (LyE) of the joints' angles. Wearing the harness increased the meanRoM of the hip, the SDRoM and the CoVRoM of the knee, and the SampEn and the LyE of the ankle. In particular, the harness effect sizes for both the SampEn and the LyE of the ankle were large, likely reflecting a meaningful decline in the neuromuscular stabilizing control of this joint.
Conclusions: Wearing a harness during treadmill walking marginally influences lower extremity kinematics, resulting in more or less subtle changes in certain kinematic variables. However, in cases where differences in gait patterns would be expressed through modifications in these variables, having subjects walk with a harness may mask or reinforce such differences.
Figures

Similar articles
-
Novel velocity estimation for symmetric and asymmetric self-paced treadmill training.J Neuroeng Rehabil. 2021 Feb 5;18(1):27. doi: 10.1186/s12984-021-00825-3. J Neuroeng Rehabil. 2021. PMID: 33546729 Free PMC article.
-
Alterations in stride-to-stride variability during walking in individuals with chronic ankle instability.Hum Mov Sci. 2015 Apr;40:154-62. doi: 10.1016/j.humov.2014.12.004. Epub 2014 Dec 29. Hum Mov Sci. 2015. PMID: 25553561
-
Kinematic comparison of split-belt and single-belt treadmill walking and the effects of accommodation.Gait Posture. 2012 Feb;35(2):287-91. doi: 10.1016/j.gaitpost.2011.09.101. Epub 2011 Oct 19. Gait Posture. 2012. PMID: 22015048 Free PMC article.
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
-
Nonlinear Dynamic Measures of Walking in Healthy Older Adults: A Systematic Scoping Review.Sensors (Basel). 2022 Jun 10;22(12):4408. doi: 10.3390/s22124408. Sensors (Basel). 2022. PMID: 35746188 Free PMC article.
Cited by
-
Joint Angle Variability Is Altered in Patients with Peripheral Artery Disease after Six Months of Exercise Intervention.Entropy (Basel). 2022 Oct 6;24(10):1422. doi: 10.3390/e24101422. Entropy (Basel). 2022. PMID: 37420442 Free PMC article.
-
Cardiovascular responses in older adults with total knee arthroplasty at rest and with exercise on a positive pressure treadmill.Eur J Appl Physiol. 2014 Mar;114(3):653-62. doi: 10.1007/s00421-013-2798-1. Epub 2013 Dec 22. Eur J Appl Physiol. 2014. PMID: 24362964
-
Prefrontal Cortex Involvement during Dual-Task Stair Climbing in Healthy Older Adults: An fNIRS Study.Brain Sci. 2021 Jan 7;11(1):71. doi: 10.3390/brainsci11010071. Brain Sci. 2021. PMID: 33430358 Free PMC article.
-
A method to concatenate multiple short time series for evaluating dynamic behaviour during walking.PLoS One. 2019 Jun 21;14(6):e0218594. doi: 10.1371/journal.pone.0218594. eCollection 2019. PLoS One. 2019. PMID: 31226152 Free PMC article.
-
Characterizing Normal and Pathological Gait through Permutation Entropy.Entropy (Basel). 2018 Jan 19;20(1):77. doi: 10.3390/e20010077. Entropy (Basel). 2018. PMID: 33265160 Free PMC article.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
