

Error analysis in a stereo vision-based pedestrian detection sensor for collision avoidance applications
- PMID: 22319323
- PMCID: PMC3274244
- DOI: 10.3390/s100403741
Error analysis in a stereo vision-based pedestrian detection sensor for collision avoidance applications
Abstract
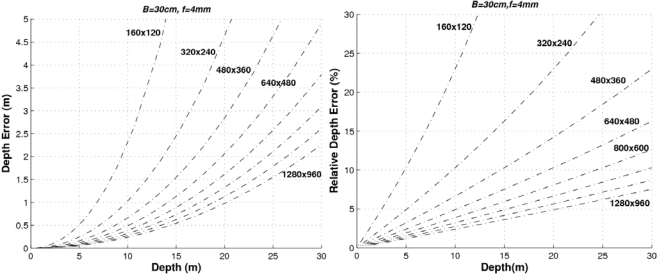
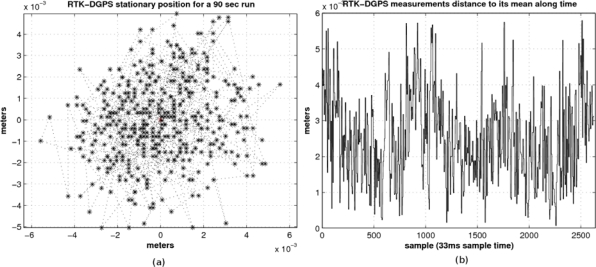
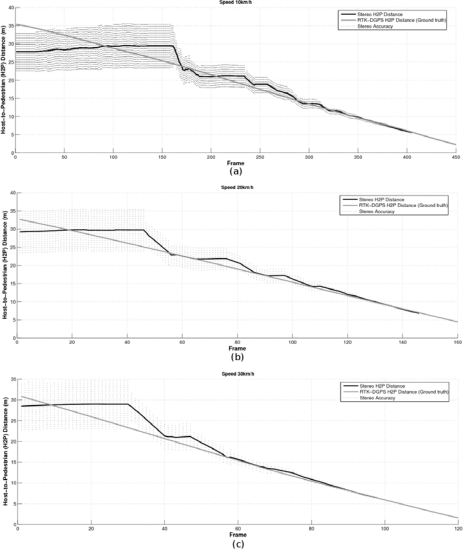
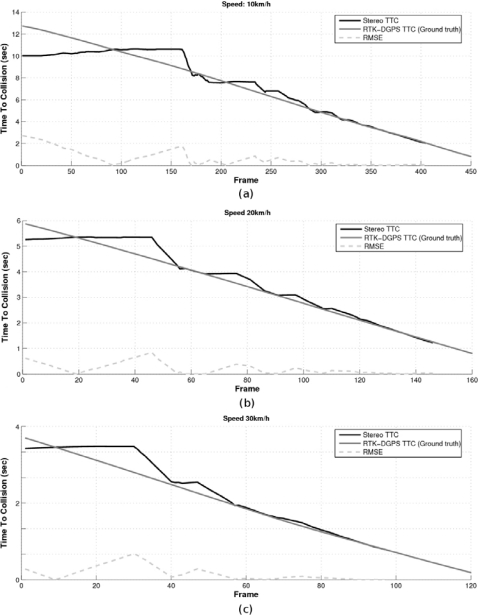
This paper presents an analytical study of the depth estimation error of a stereo vision-based pedestrian detection sensor for automotive applications such as pedestrian collision avoidance and/or mitigation. The sensor comprises two synchronized and calibrated low-cost cameras. Pedestrians are detected by combining a 3D clustering method with Support Vector Machine-based (SVM) classification. The influence of the sensor parameters in the stereo quantization errors is analyzed in detail providing a point of reference for choosing the sensor setup according to the application requirements. The sensor is then validated in real experiments. Collision avoidance maneuvers by steering are carried out by manual driving. A real time kinematic differential global positioning system (RTK-DGPS) is used to provide ground truth data corresponding to both the pedestrian and the host vehicle locations. The performed field test provided encouraging results and proved the validity of the proposed sensor for being used in the automotive sector towards applications such as autonomous pedestrian collision avoidance.
Keywords: 3D sensors; automotive industry; computer vision; pedestrian detection; stereo quantization errors.
Figures










References
-
- Gavrila D.M. The visual analysis of human movement: A survey. Comp. Vis. Image Underst. 1999;73:82–89.
-
- Moeslund T.B., Hilton A., Krüger V. A survey of advances in vision-based human motion capture and analysis. Comp. Vis. Image Underst. 2006;104:90–126.
-
- Poppe R. A Vision-based human motion analysis: An overview. Comp. Vis. Image Underst. 2007;108:4–18.
-
- Gandhi T., Trivedi M.M. Pedestrian protection systems: Issues, survey, and challenges. IEEE Trans. Intell. Transp. Syst. 2007;8:413–430.
-
- Gerónimo D., López M.L., Sappa A.D., Graft T. Survey of pedestrian detection for advanced driver assistance systems. IEEE Trans. Pattern Anal. Mach. Intell. 2009 (in press); Available online: http://www.cvc.uab.es/adas/publications/geronimo_pami2009.pdf (accessed on 20 January 2010). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
