

Dynamic margins of stability during human walking in destabilizing environments
- PMID: 22326059
- PMCID: PMC3321251
- DOI: 10.1016/j.jbiomech.2011.12.027
Dynamic margins of stability during human walking in destabilizing environments
Abstract
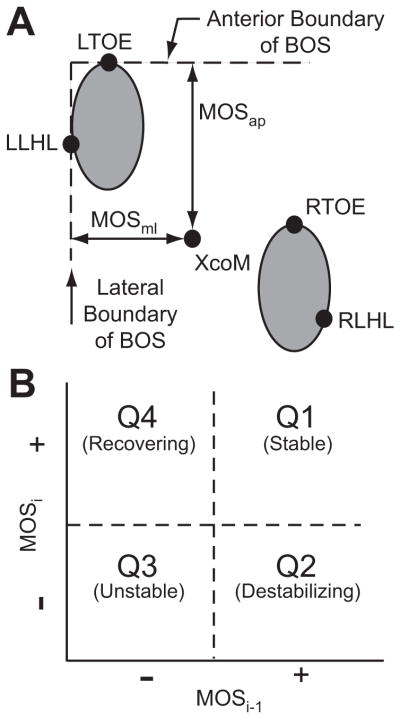
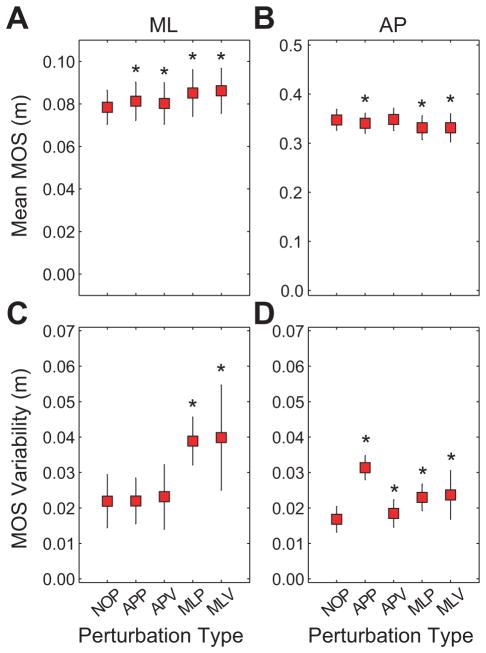
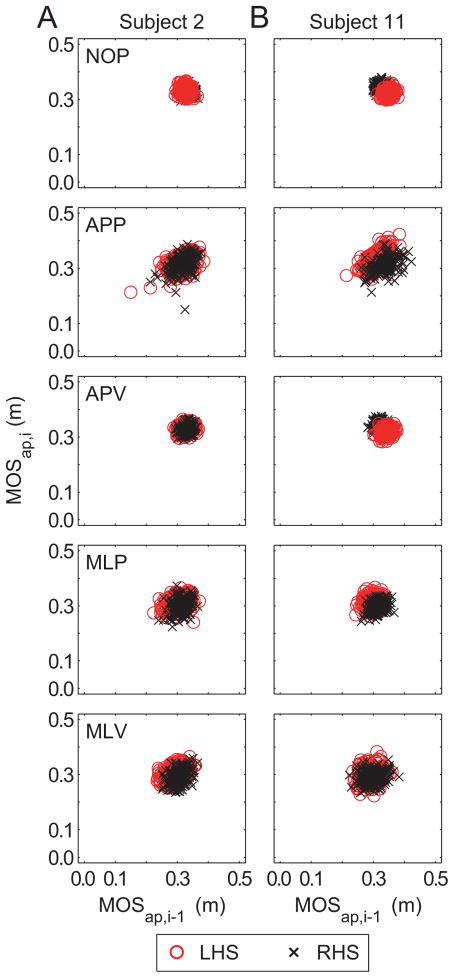
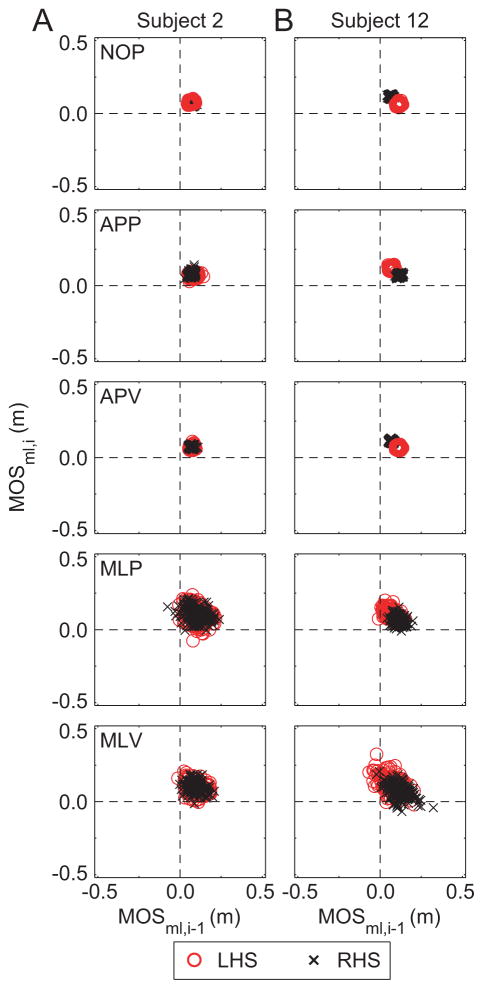
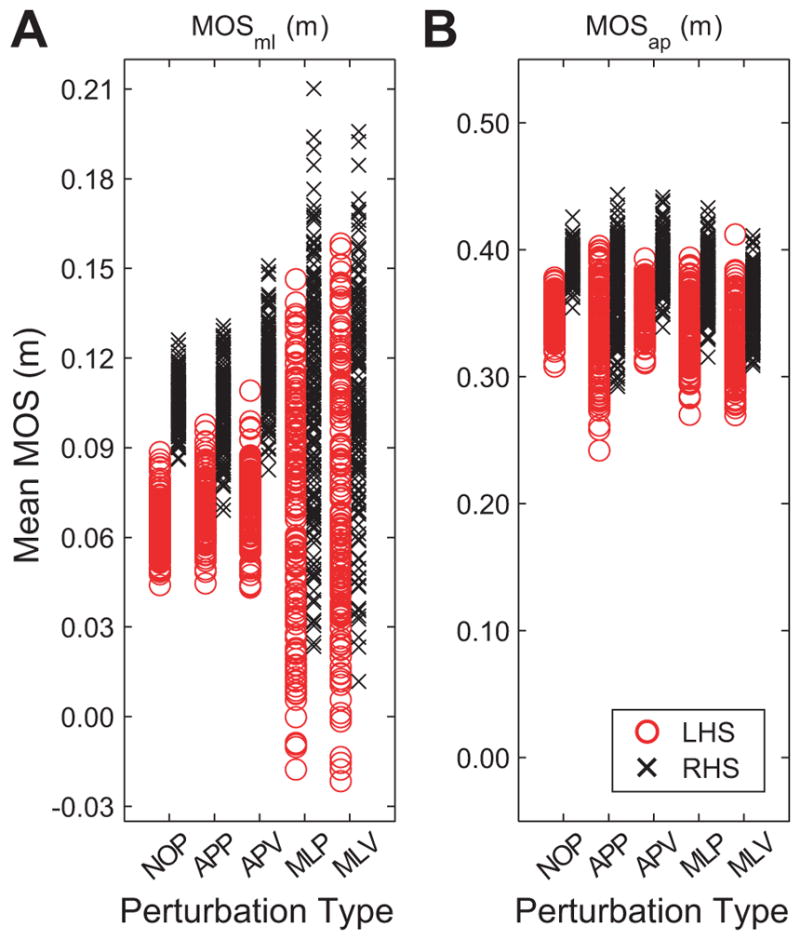
Understanding how humans maintain stability when walking, particularly when exposed to perturbations, is key to preventing falls. Here, we quantified how imposing continuous, pseudorandom anterior-posterior (AP) and mediolateral (ML) oscillations affected the control of dynamic walking stability. Twelve subjects completed five 3-minute walking trials in the Computer Assisted Rehabilitation ENvironment (CAREN) system under each of 5 conditions: no perturbation (NOP), AP platform (APP) or visual (APV) or ML platform (MLP) or visual (MLV) oscillations. We computed AP and ML margins of stability (MOS) for each trial. Mean MOS(ml) were consistently slightly larger during all perturbation conditions than during NOP (p≤0.038). Mean MOS(ap) for the APP, MLP and MLV oscillations were significantly smaller than during NOP (p<0.0005). Variability of both MOS(ap) and MOS(ml) was significantly greater during the MLP and MLV oscillations than during NOP (p<0.0005). We also directly quantified how the MOS on any given step affected the MOS on the following step using first-return plots. There were significant changes in step-to-step MOS(ml) dynamics between experimental conditions (p<0.0005). These changes suggested that subjects may have been trying to control foot placement, and consequently stability, during the perturbation conditions. Quantifying step-to-step changes in margins of dynamic stability may be more useful than mean MOS in assessing how individuals control walking stability.
Copyright © 2012 Elsevier Ltd. All rights reserved.
Conflict of interest statement
CONFLICT OF INTEREST
The authors declare that there is no conflict of interest associated with this work.
Figures
References
-
- Bardy BG, Warren WH, Kay BA. Motion parallax is used to control postural sway during walking. Experimental Brain Research. 1996;111 (2):271–282. - PubMed
-
- Brady RA, Peters BT, Bloomberg JJ. Strategies of healthy adults walking on a laterally oscillating treadmill. Gait & Posture. 2009;29 (4):645–649. - PubMed
-
- Curtze C, Hof AL, Otten B, Postema K. Balance recovery after an evoked forward fall in unilateral transtibial amputees. Gait & Posture. 2010;32 (3):336–341. - PubMed
-
- Dingwell JB, John J, Cusumano JP. Do humans optimally exploit redundancy to control step variability in walking? PLoS Computational Biology. 2010;6(7):e1000856. http://dx.doi.org/10.1371/journal.pcbi.1000856. - DOI - PMC - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
