

The integration of motion and disparity cues to depth in dorsal visual cortex
- PMID: 22327475
- PMCID: PMC3378632
- DOI: 10.1038/nn.3046
The integration of motion and disparity cues to depth in dorsal visual cortex
Abstract
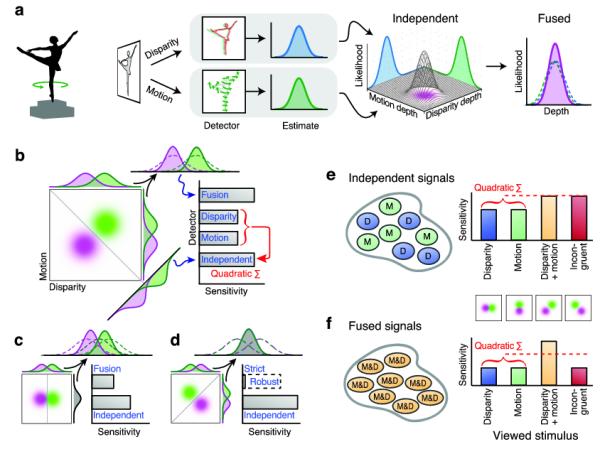
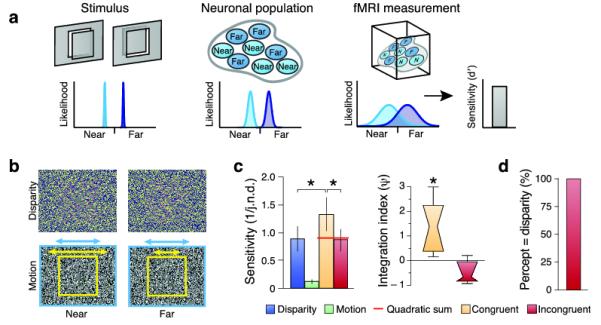
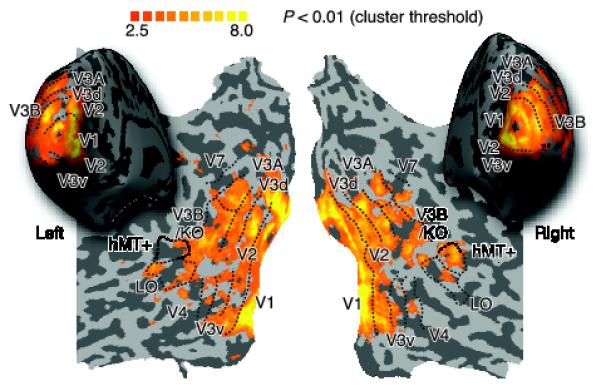
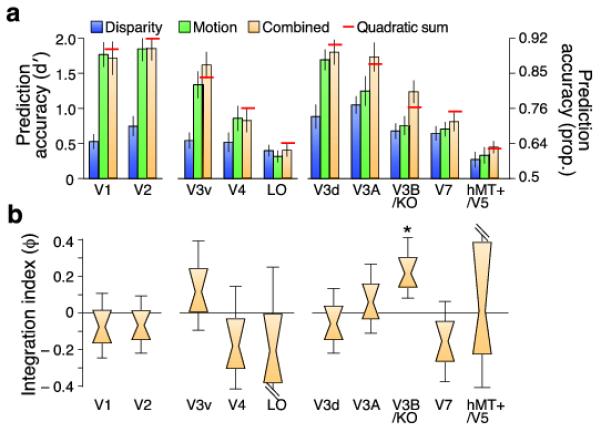
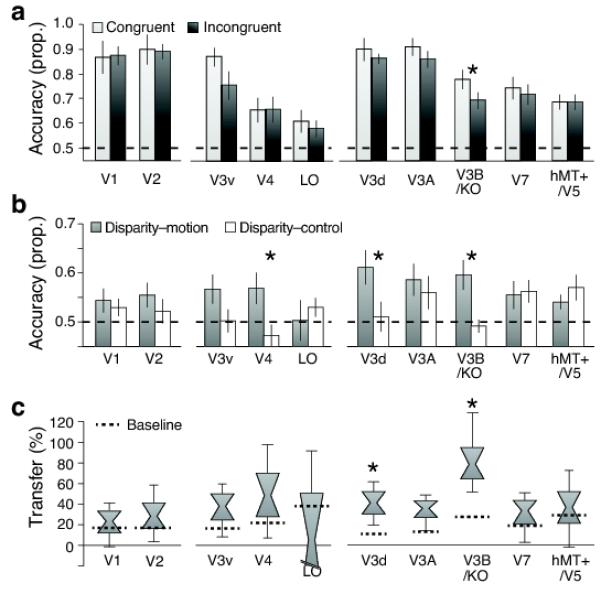
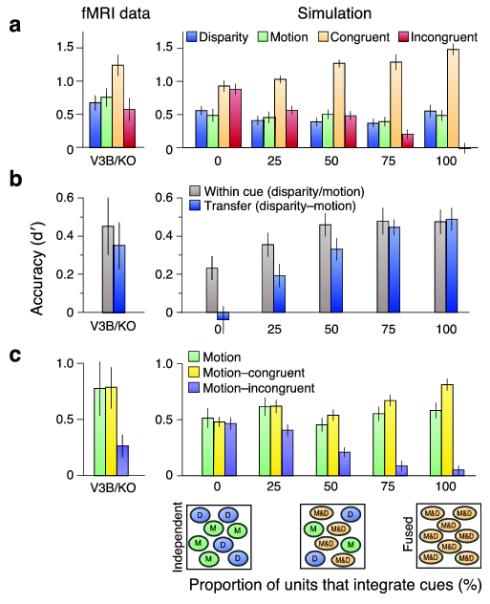
Humans exploit a range of visual depth cues to estimate three-dimensional structure. For example, the slant of a nearby tabletop can be judged by combining information from binocular disparity, texture and perspective. Behavioral tests show humans combine cues near-optimally, a feat that could depend on discriminating the outputs from cue-specific mechanisms or on fusing signals into a common representation. Although fusion is computationally attractive, it poses a substantial challenge, requiring the integration of quantitatively different signals. We used functional magnetic resonance imaging (fMRI) to provide evidence that dorsal visual area V3B/KO meets this challenge. Specifically, we found that fMRI responses are more discriminable when two cues (binocular disparity and relative motion) concurrently signal depth, and that information provided by one cue is diagnostic of depth indicated by the other. This suggests a cortical node important when perceiving depth, and highlights computations based on fusion in the dorsal stream.
Figures
References
-
- Dosher BA, Sperling G, Wurst SA. Tradeoffs between stereopsis and proximity luminance covariance as determinants of perceived 3D structure. Vision Res. 1986;26:973–990. - PubMed
-
- Buelthoff HH, Mallot HA. Integration of Depth Modules - Stereo and Shading. Journal of the Optical Society of America a-Optics Image Science and Vision. 1988;5:1749–1758. - PubMed
-
- Landy MS, Maloney LT, Johnston EB, Young M. Measurement and Modeling of Depth Cue Combination - in Defense of Weak Fusion. Vision Research. 1995;35:389–412. - PubMed
-
- Clark JJ, Yuille AL. Data fusion for sensory information processing systems. Kluwer Academic; 1990.
-
- Ernst MO, Banks MS. Humans integrate visual and haptic information in a statistically optimal fashion. Nature. 2002;415:429–433. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
