

Using tri-axial acceleration data to identify behavioral modes of free-ranging animals: general concepts and tools illustrated for griffon vultures
- PMID: 22357592
- PMCID: PMC3284320
- DOI: 10.1242/jeb.058602
Using tri-axial acceleration data to identify behavioral modes of free-ranging animals: general concepts and tools illustrated for griffon vultures
Abstract
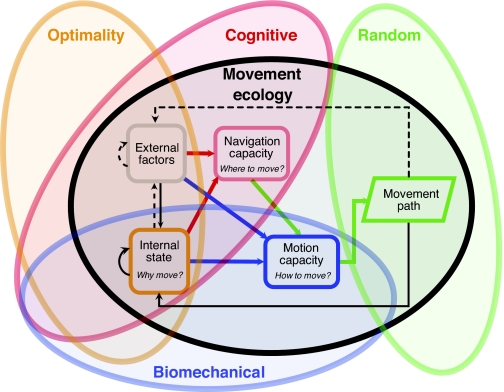
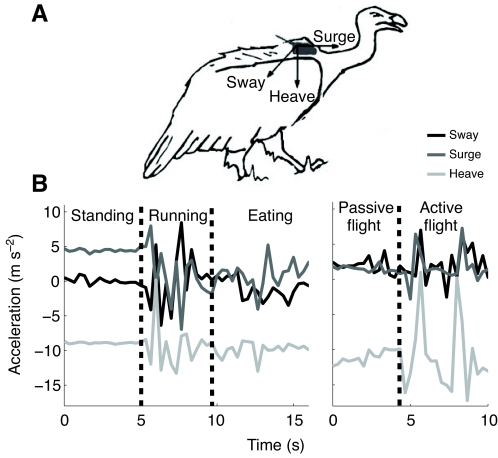
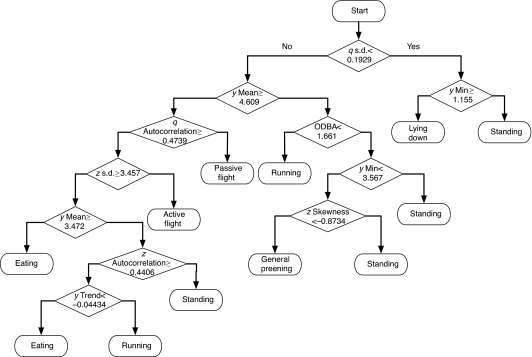
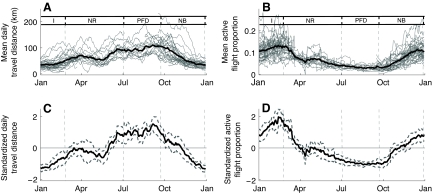
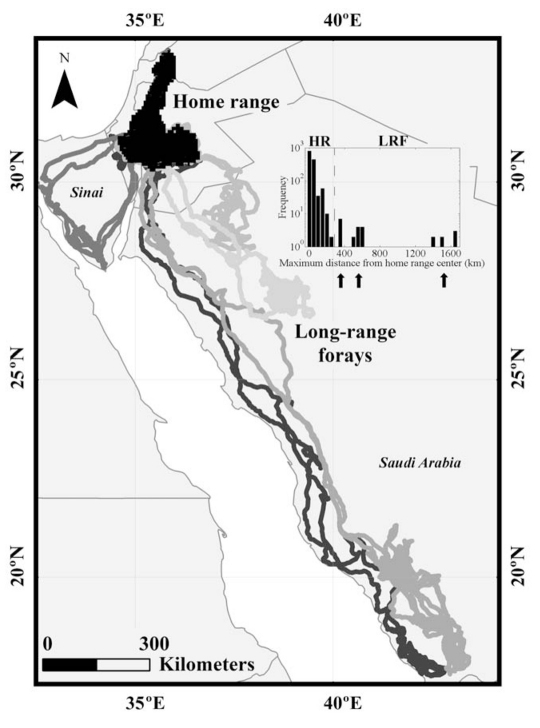
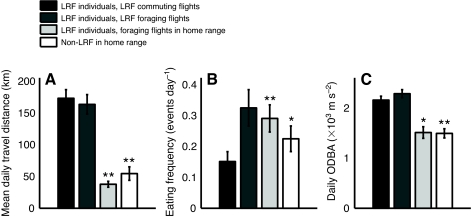
Integrating biomechanics, behavior and ecology requires a mechanistic understanding of the processes producing the movement of animals. This calls for contemporaneous biomechanical, behavioral and environmental data along movement pathways. A recently formulated unifying movement ecology paradigm facilitates the integration of existing biomechanics, optimality, cognitive and random paradigms for studying movement. We focus on the use of tri-axial acceleration (ACC) data to identify behavioral modes of GPS-tracked free-ranging wild animals and demonstrate its application to study the movements of griffon vultures (Gyps fulvus, Hablizl 1783). In particular, we explore a selection of nonlinear and decision tree methods that include support vector machines, classification and regression trees, random forest methods and artificial neural networks and compare them with linear discriminant analysis (LDA) as a baseline for classifying behavioral modes. Using a dataset of 1035 ground-truthed ACC segments, we found that all methods can accurately classify behavior (80-90%) and, as expected, all nonlinear methods outperformed LDA. We also illustrate how ACC-identified behavioral modes provide the means to examine how vulture flight is affected by environmental factors, hence facilitating the integration of behavioral, biomechanical and ecological data. Our analysis of just over three-quarters of a million GPS and ACC measurements obtained from 43 free-ranging vultures across 9783 vulture-days suggests that their annual breeding schedule might be selected primarily in response to seasonal conditions favoring rising-air columns (thermals) and that rare long-range forays of up to 1750 km from the home range are performed despite potentially heavy energetic costs and a low rate of food intake, presumably to explore new breeding, social and long-term resource location opportunities.
Figures
References
-
- Altun K., Barshan B., Tuncel O. (2010). Comparative study on classifying human activities with miniature inertial and magnetic sensors. Pattern Recognit. 43, 3605–3620
-
- Boettiger A., Wittemyer G., Starfield R., Volrath F., Douglas-Hamilton I., Getz W. M. (2011). Inferring ecological and behavioral drivers of elephant movement using a linear filtering approach. Ecology 92, 1648–1657 - PubMed
-
- Bouten C. V., Westerterp K. R., Verduin M., Janssen J. D. (1994). Assessment of energy expenditure for physical activity using a triaxial accelerometer. Med. Sci. Sports Exerc. 26, 1516–1523 - PubMed
-
- Breiman L. (2001). Random forests. Mach. Learn. 45, 5–32
-
- Byrnes G., Libby T., Lim N. T. L., Spence A. J. (2011). Gliding saves time but not energy in Malayan colugos. J. Exp. Biol. 214, 2690–2696 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
