

Comparison of list-mode and DIRECT approaches for time-of-flight PET reconstruction
- PMID: 22410326
- PMCID: PMC3389166
- DOI: 10.1109/TMI.2012.2190088
Comparison of list-mode and DIRECT approaches for time-of-flight PET reconstruction
Abstract
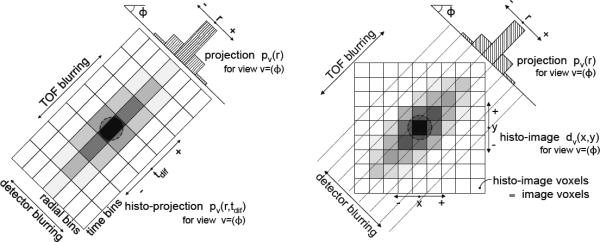
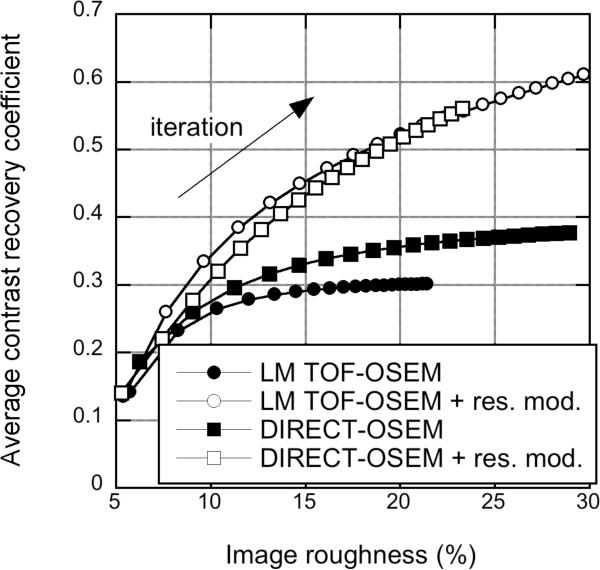
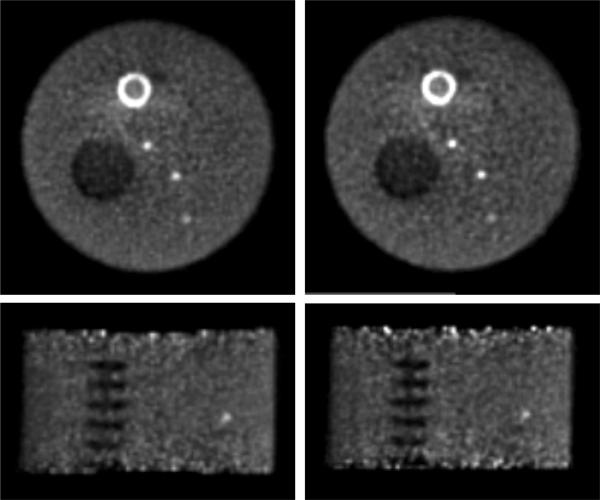
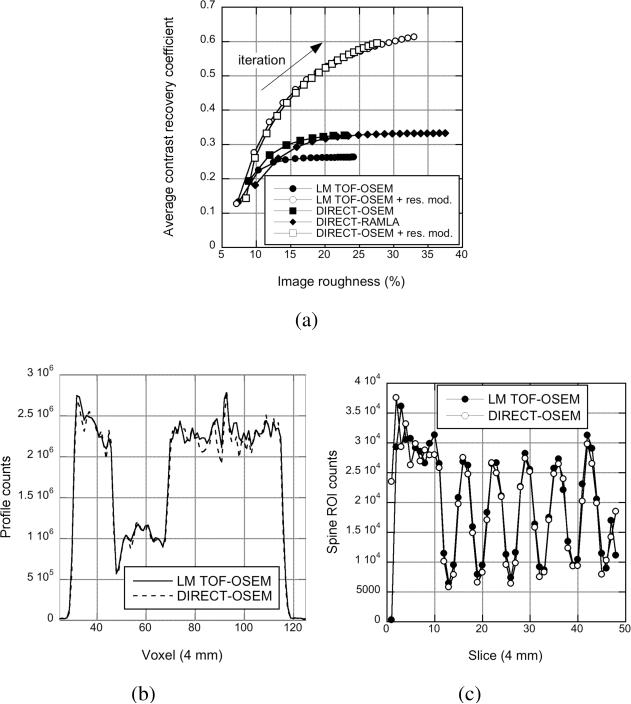
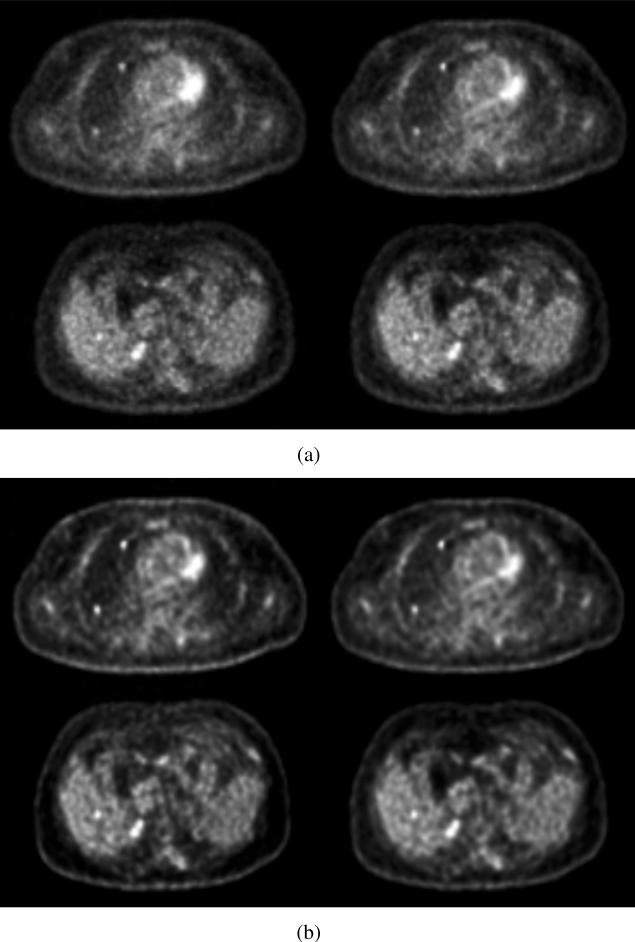
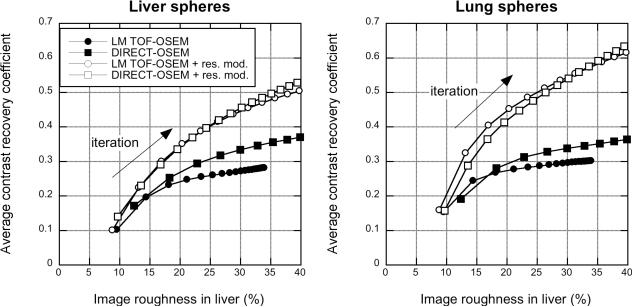
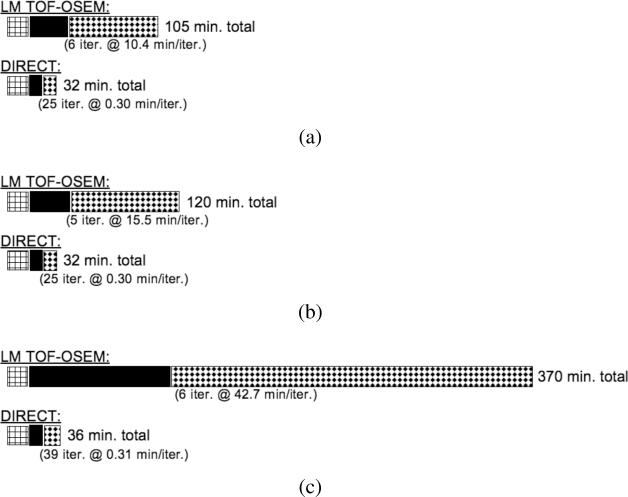
Early clinical results with time-of-flight (TOF) positron emission tomography (PET) systems have demonstrated the advantages of TOF information in PET reconstruction. Reconstruction approaches in TOF-PET systems include list-mode and binned iterative algorithms as well as confidence-weighted analytic methods. List-mode iterative TOF reconstruction retains the resolutions of the data in the spatial and temporal domains without any binning approximations but is computationally intensive. We have developed an approach [DIRECT (direct image reconstruction for TOF)] to speed up TOF-PET reconstruction that takes advantage of the reduced angular sampling requirement of TOF data by grouping list-mode data into a small number of azimuthal views and co-polar tilts and depositing the grouped events into histo-images, arrays with the sampling and geometry of the final image. All physical effects are included in the system model and deposited in the same histo-image structure. Using histo-images allows efficient computation during reconstruction without ray-tracing or interpolation operations. The DIRECT approach was compared with 3-D list-mode TOF ordered subsets expectation maximization (OSEM) reconstruction for phantom and patient data taken on the University of Pennsylvania research LaBr (3) TOF-PET scanner. The total processing and reconstruction time for these studies with DIRECT without attention to code optimization is approximately 25%-30% that of list-mode TOF-OSEM to achieve comparable image quality. Furthermore, the reconstruction time for DIRECT is independent of the number of events and/or sizes of the spatial and TOF kernels, while the time for list-mode TOF-OSEM increases with more events or larger kernels. The DIRECT approach is able to reproduce the image quality of list-mode iterative TOF reconstruction both qualitatively and quantitatively in measured data with a reduced time.
Figures
References
-
- Snyder DL, Thomas LJ, Jr., Ter-Pogossian MM. A mathematical model for positron-emission tomography systems having time-of-flight measurements. IEEE Trans. Nucl. Sci. 1981;NS-28:3575–3583.
-
- Philippe EA, Mullani NA, Wong W-H, Hartz R. Real-time image reconstruction for time-of-flight positron emission tomography (TOFPET) IEEE Trans. Nucl. Sci. 1982;NS-29:524–528.
