

Accuracy and resolution of Kinect depth data for indoor mapping applications
- PMID: 22438718
- PMCID: PMC3304120
- DOI: 10.3390/s120201437
Accuracy and resolution of Kinect depth data for indoor mapping applications
Abstract
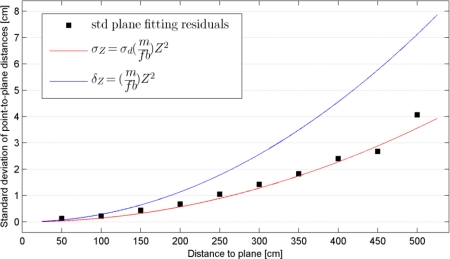
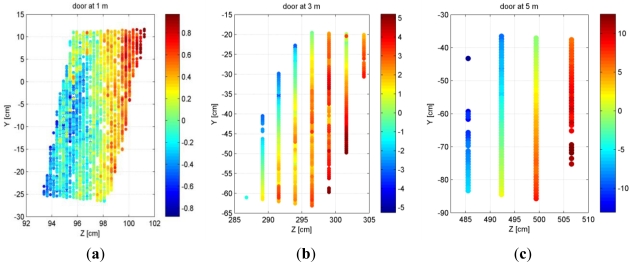
Consumer-grade range cameras such as the Kinect sensor have the potential to be used in mapping applications where accuracy requirements are less strict. To realize this potential insight into the geometric quality of the data acquired by the sensor is essential. In this paper we discuss the calibration of the Kinect sensor, and provide an analysis of the accuracy and resolution of its depth data. Based on a mathematical model of depth measurement from disparity a theoretical error analysis is presented, which provides an insight into the factors influencing the accuracy of the data. Experimental results show that the random error of depth measurement increases with increasing distance to the sensor, and ranges from a few millimeters up to about 4 cm at the maximum range of the sensor. The quality of the data is also found to be influenced by the low resolution of the depth measurements.
Keywords: RGB-D; calibration; error budget; imaging; laser scanning; point cloud; range camera; sensor; triangulation.
Figures





References
-
- Microsoft Kinect. Available online: http://www.xbox.com/en-us/kinect/ (accessed on 14 December 2011).
-
- PrimeSense Available online: http://www.primesense.com/ (accessed on 14 December 2011).
-
- Amit B., Dagan E., Gershom K., Alon L., Yinon O., Yaron Y. Enhanced interactive gaming by blending full-body tracking and gesture animation. Proceedings of the ACM SIGGRAPH ASIA 2010 Sketches; Seoul, Korea. 15–18 December 2010.
-
- Andrew D.W. Using a depth camera as a touch sensor. Proceedings of the ACM International Conference on Interactive Tabletops and Surfaces; Saarbrucken, Germany. 7–10 November 2010.
-
- Chang Y.J., Chen S.F., Huang J.D. A Kinect-based system for physical rehabilitation: A pilot study for young adults with motor disabilities. Res. Dev. Disabil. 2011;32:2566–2570. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
