

Challenges and new approaches to proving the existence of muscle synergies of neural origin
- PMID: 22570602
- PMCID: PMC3342930
- DOI: 10.1371/journal.pcbi.1002434
Challenges and new approaches to proving the existence of muscle synergies of neural origin
Abstract
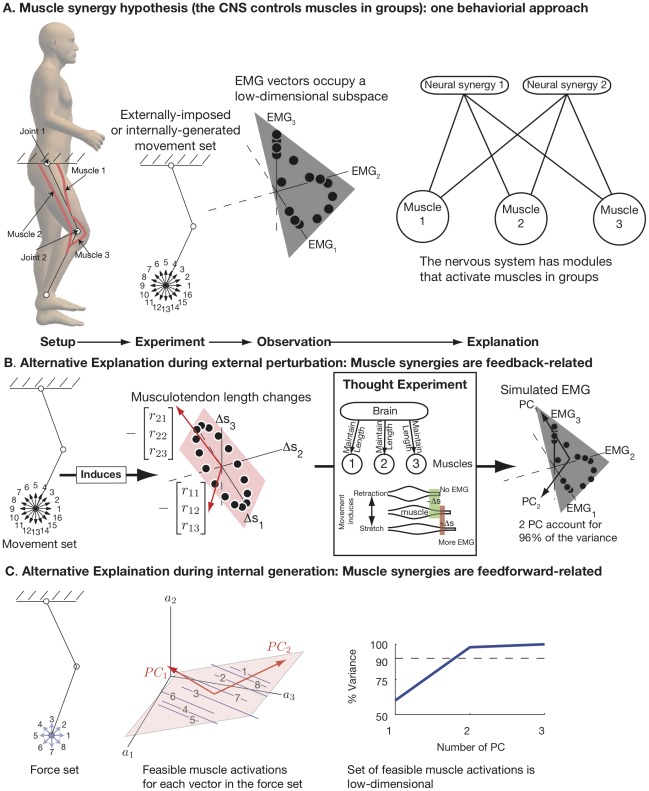
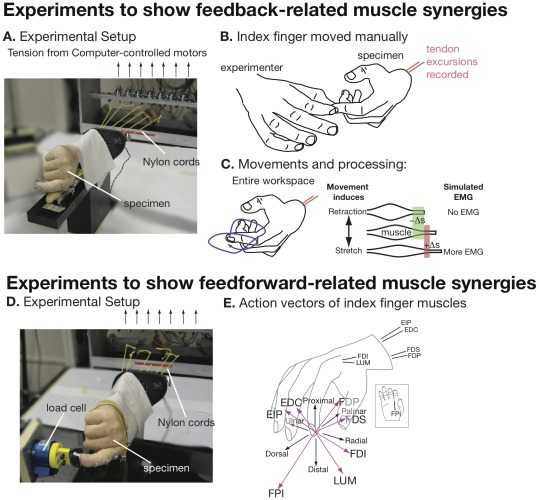
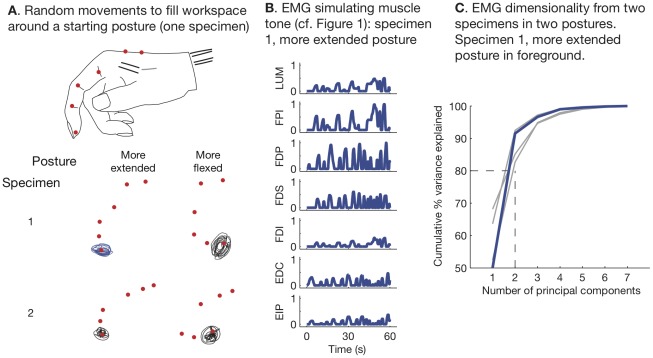
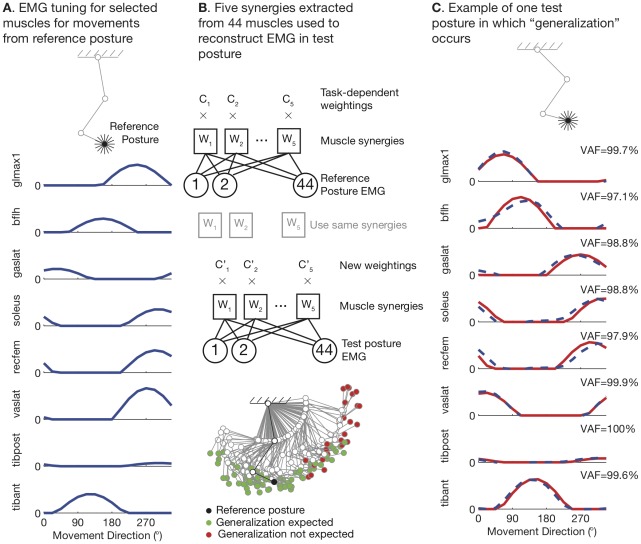
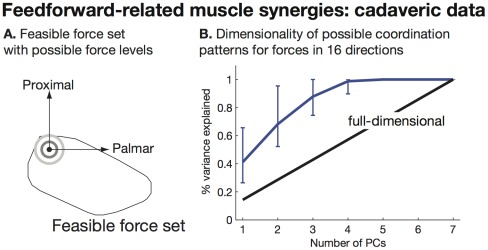
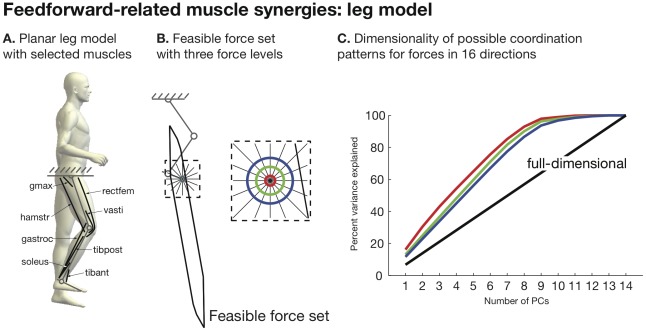
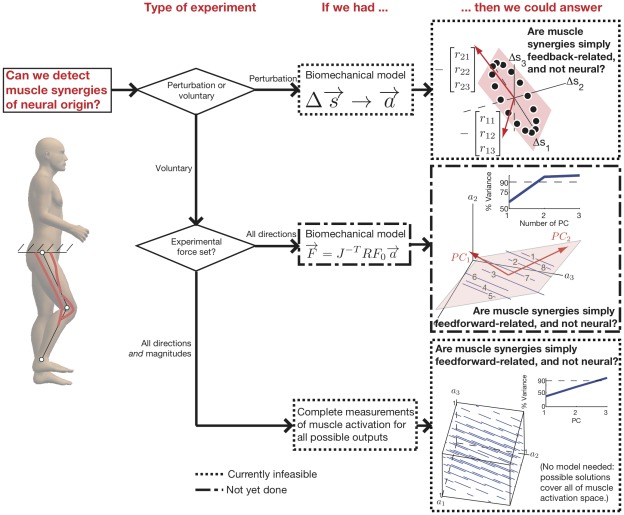
Muscle coordination studies repeatedly show low-dimensionality of muscle activations for a wide variety of motor tasks. The basis vectors of this low-dimensional subspace, termed muscle synergies, are hypothesized to reflect neurally-established functional muscle groupings that simplify body control. However, the muscle synergy hypothesis has been notoriously difficult to prove or falsify. We use cadaveric experiments and computational models to perform a crucial thought experiment and develop an alternative explanation of how muscle synergies could be observed without the nervous system having controlled muscles in groups. We first show that the biomechanics of the limb constrains musculotendon length changes to a low-dimensional subspace across all possible movement directions. We then show that a modest assumption--that each muscle is independently instructed to resist length change--leads to the result that electromyographic (EMG) synergies will arise without the need to conclude that they are a product of neural coupling among muscles. Finally, we show that there are dimensionality-reducing constraints in the isometric production of force in a variety of directions, but that these constraints are more easily controlled for, suggesting new experimental directions. These counter-examples to current thinking clearly show how experimenters could adequately control for the constraints described here when designing experiments to test for muscle synergies--but, to the best of our knowledge, this has not yet been done.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- d'Avella A, Saltiel P, Bizzi E. Combinations of muscle synergies in the construction of a natural motor behavior. Nat Neurosci. 2003;6:300–308. - PubMed
-
- Ting LH, Macpherson JM. A limited set of muscle synergies for force control during a postural task. J Neurophysiol. 2005;93:609–613. - PubMed
-
- Tresch MC, Saltiel P, Bizzi E. The construction of movement by the spinal cord. Nat Neurosci. 1999;2:162–167. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
