

Review
doi: 10.1016/j.conb.2012.05.003.
Epub 2012 May 29.
Motor control is decision-making
Affiliations
- PMID: 22647641
- PMCID: PMC3434279
- DOI: 10.1016/j.conb.2012.05.003
Item in Clipboard
Review
Motor control is decision-making
Curr Opin Neurobiol.
2012 Dec.
Abstract
Motor behavior may be viewed as a problem of maximizing the utility of movement outcome in the face of sensory, motor and task uncertainty. Viewed in this way, and allowing for the availability of prior knowledge in the form of a probability distribution over possible states of the world, the choice of a movement plan and strategy for motor control becomes an application of statistical decision theory. This point of view has proven successful in recent years in accounting for movement under risk, inferring the loss function used in motor tasks, and explaining motor behavior in a wide variety of circumstances.
Copyright © 2012 Elsevier Ltd. All rights reserved.
Figures
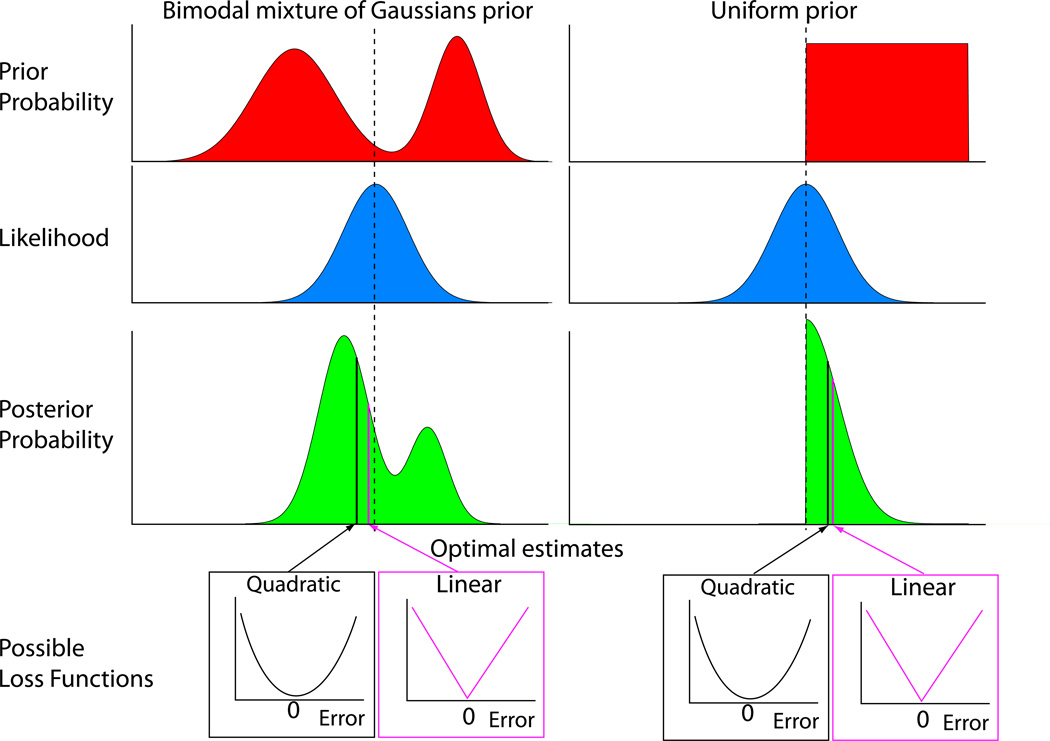
The optimal choice depends on the prior, likelihood and loss function. In this schematic we consider pointing to the location of a target in one dimension. The top row shows two different possible priors (red curves) for target locations that might be imposed by task conditions, a mixture of two Gaussians (left) or a uniform prior over limited range (right). When the target is seen, the noisy sensory data specify a likelihood (blue curves). In this case the visual location of the target has been corrupted by Gaussian noise. The posterior probability (green curves) is the point-wise product of the prior and the likelihood (renormalized so that the area under the curve is one). The final decision depends on the loss function. Two possible loss functions are shown, one in which the loss increases quadratically (black curve) and the other in which it increases linearly (magenta) with error. The optimal estimate, shown by the arrows and lines on the posterior, depends on all three components.
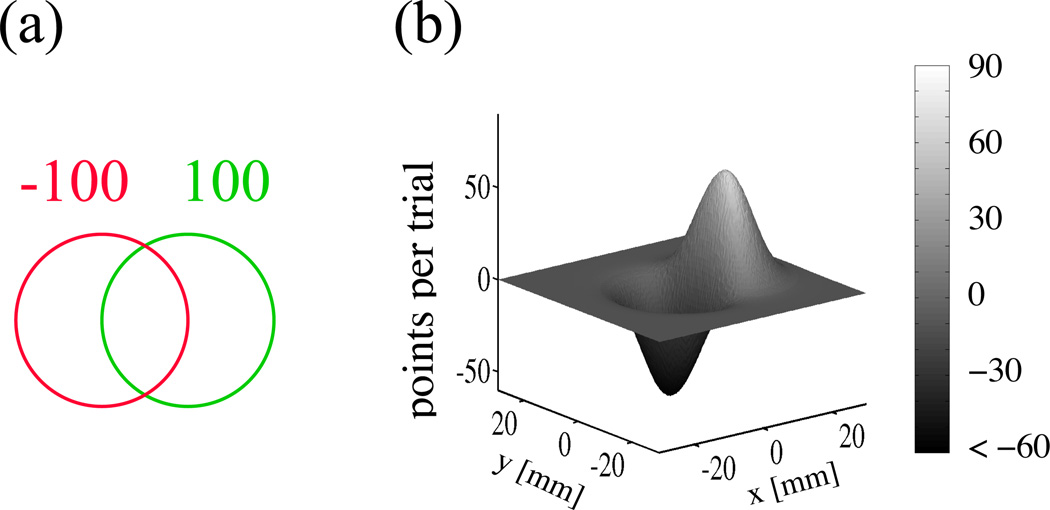
(a) In a rapid reaching task, subjects are awarded points (as indicated) for landing in the green target and penalties for landing in the red penalty region. (b) A typical gain landscape reflecting the, expected gain as a function of aimpoint. The expected gain takes into account subjects’ motor variability.
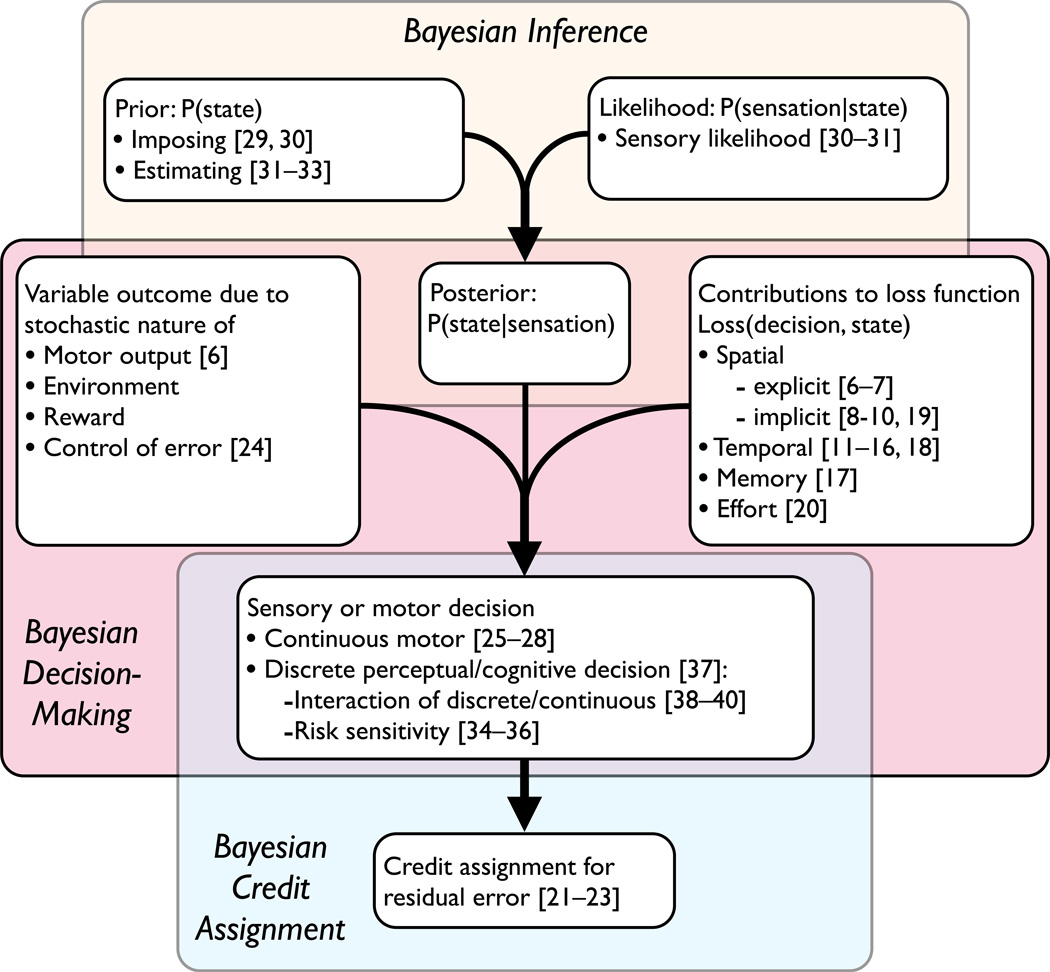
Three stages of sensory and motor decisions: Bayesian inference, decision-making and credit assignment. We cross-reference the primary focus of the articles we have surveyed to the elements of sensory/motor decision processes.
References
-
- Trommershäuser J, Maloney LT, Landy MS. The Expected Utility of Movement. In: Glimcher PW, Camerer CF, Fehr E, Poldrack RA, editors. Neuroeconomics: Decision Making and the Brain. Academic Press; 2009. pp. 95–111.
-
- Berniker M, Körding K. Bayesian approaches to sensory integration for motor control. WIREs Cogn Sci. 2011;2:419–428. - PubMed
-
- Maloney LT, Zhang H. Decision-theoretic models of visual perception and action. Vision Research. 2010;50:2362–2374. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
