

Spatiotemporal activity estimation for multivoxel pattern analysis with rapid event-related designs
- PMID: 22659443
- PMCID: PMC3408801
- DOI: 10.1016/j.neuroimage.2012.05.057
Spatiotemporal activity estimation for multivoxel pattern analysis with rapid event-related designs
Abstract
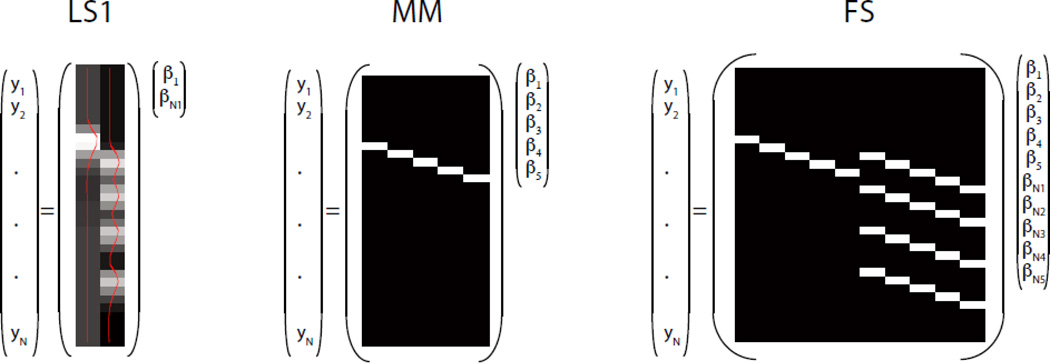
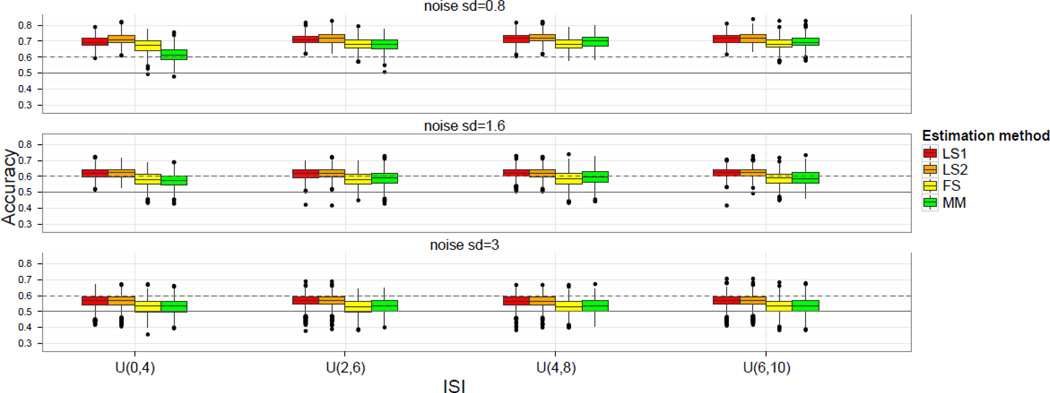
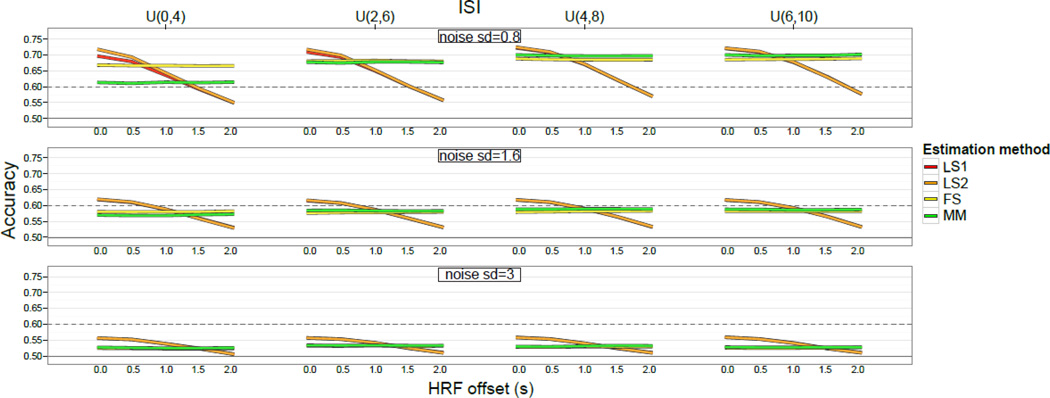
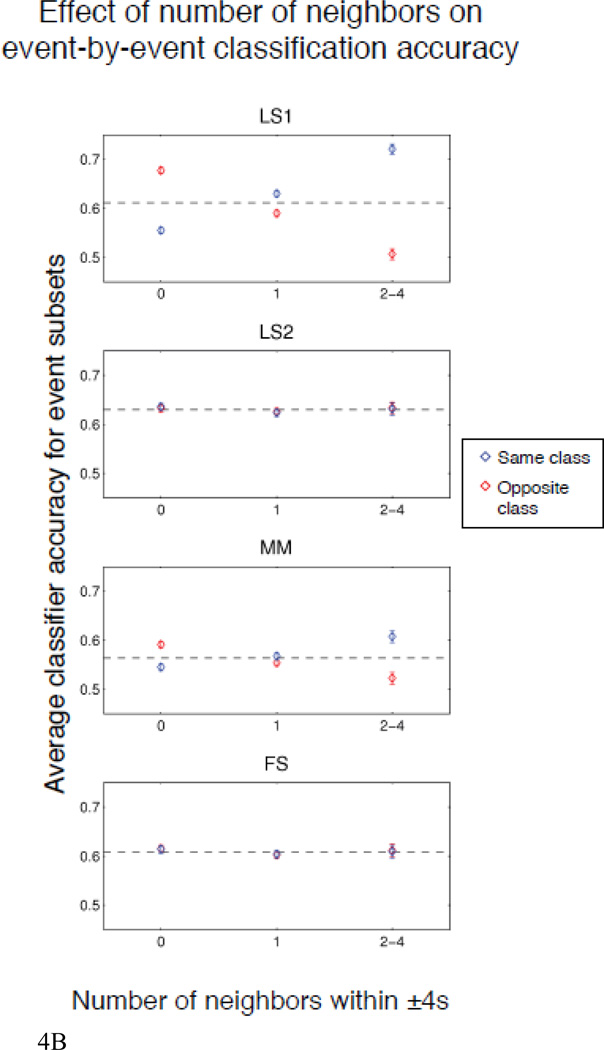
Despite growing interest in multi-voxel pattern analysis (MVPA) methods for fMRI, a major problem remains--that of generating estimates in rapid event-related (ER) designs, where the BOLD responses of temporally adjacent events will overlap. While this problem has been investigated for methods that reduce each event to a single parameter per voxel (Mumford et al., 2012), most of these methods make strong parametric assumptions about the shape of the hemodynamic response, and require exact knowledge of the temporal profile of the underlying neural activity. A second class of methods uses multiple parameters per event (per voxel) to capture temporal information more faithfully. In addition to enabling a more accurate estimate of ER responses, this allows for the extension of the standard classification paradigm into the temporal domain (e.g., Mourão-Miranda et al., 2007). However, existing methods in this class were developed for use with block and slow ER data, and there has not yet been an exploration of how to adapt such methods to data collected using rapid ER designs. Here, we demonstrate that the use of multiple parameters preserves or improves classification accuracy, while additionally providing information on the evolution of class discrimination. Additionally, we explore an alternative to the method of Mourão-Miranda et al. tailored to use in rapid ER designs that yields equivalent classification accuracies, but is better at unmixing responses to temporally adjacent events. The current work paves the way for wider adoption of spatiotemporal classification analyses, and greater use of MVPA with rapid ER designs.
Copyright © 2012 Elsevier Inc. All rights reserved.
Figures

Similar articles
-
Influence of activation pattern estimates and statistical significance tests in fMRI decoding analysis.J Neurosci Methods. 2018 Oct 1;308:248-260. doi: 10.1016/j.jneumeth.2018.06.017. Epub 2018 Jul 6. J Neurosci Methods. 2018. PMID: 30352691
-
How does an fMRI voxel sample the neuronal activity pattern: compact-kernel or complex spatiotemporal filter?Neuroimage. 2010 Feb 1;49(3):1965-76. doi: 10.1016/j.neuroimage.2009.09.059. Epub 2009 Oct 1. Neuroimage. 2010. PMID: 19800408 Free PMC article.
-
Optimizing fMRI experimental design for MVPA-based BCI control: Combining the strengths of block and event-related designs.Neuroimage. 2019 Feb 1;186:369-381. doi: 10.1016/j.neuroimage.2018.10.080. Epub 2018 Nov 1. Neuroimage. 2019. PMID: 30391345
-
Deconvolving BOLD activation in event-related designs for multivoxel pattern classification analyses.Neuroimage. 2012 Feb 1;59(3):2636-43. doi: 10.1016/j.neuroimage.2011.08.076. Epub 2011 Sep 5. Neuroimage. 2012. PMID: 21924359 Free PMC article.
-
Unmixing fMRI with independent component analysis.IEEE Eng Med Biol Mag. 2006 Mar-Apr;25(2):79-90. doi: 10.1109/memb.2006.1607672. IEEE Eng Med Biol Mag. 2006. PMID: 16568940 Review. No abstract available.
Cited by
-
Brain activity across the development of automatic categorization: a comparison of categorization tasks using multi-voxel pattern analysis.Neuroimage. 2013 May 1;71:284-97. doi: 10.1016/j.neuroimage.2013.01.008. Epub 2013 Jan 17. Neuroimage. 2013. PMID: 23333700 Free PMC article.
-
Interaction between the prefrontal and visual cortices supports subjective fear.Philos Trans R Soc Lond B Biol Sci. 2024 Aug 26;379(1908):20230245. doi: 10.1098/rstb.2023.0245. Epub 2024 Jul 15. Philos Trans R Soc Lond B Biol Sci. 2024. PMID: 39005034 Free PMC article.
-
Goal-oriented representations in the human hippocampus during planning and navigation.Nat Commun. 2023 May 23;14(1):2946. doi: 10.1038/s41467-023-35967-6. Nat Commun. 2023. PMID: 37221176 Free PMC article.
-
Functional network changes and cognitive control in schizophrenia.Neuroimage Clin. 2017 May 2;15:161-170. doi: 10.1016/j.nicl.2017.05.001. eCollection 2017. Neuroimage Clin. 2017. PMID: 28529872 Free PMC article.
-
Neural Representations of Emotions in Visual, Auditory, and Modality-Independent Regions Reflect Idiosyncratic Conceptual Knowledge.Hum Brain Mapp. 2024 Oct;45(14):e70040. doi: 10.1002/hbm.70040. Hum Brain Mapp. 2024. PMID: 39394899 Free PMC article.
References
-
- Ashby FG. Statistical analysis of fMRI data. Cambridge, MA: MIT Press; 2011.
-
- Cox DD, Savoy RL. Functional magnetic resonance imaging (fMRI) ”brain reading”: Detecting and classifying distributed patterns of fMRI activity in human visual cortex. NeuroImage. 2003;19:261–270. - PubMed
-
- Dale AM, Buckner RL. Selective averaging of rapidly presented individual trials using fMRI. Human Brain Mapping. 1997;5:329–340. - PubMed
-
- Friston KJ, Holmes AP, Worsley KJ, Poline J-P, Frith CD, Frackowiak RSJ. Statistical parametric maps in functional imaging: A general linear approach. Human Brain Mapping. 1995;2:189–210.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
