

A novel integrated multifunction micro-sensor for three-dimensional micro-force measurements
- PMID: 22666017
- PMCID: PMC3355398
- DOI: 10.3390/s120404051
A novel integrated multifunction micro-sensor for three-dimensional micro-force measurements
Abstract
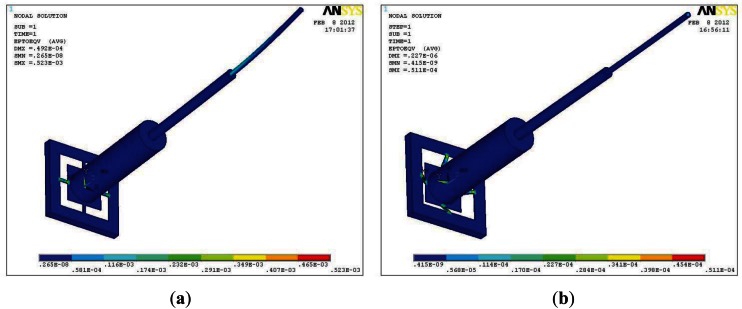
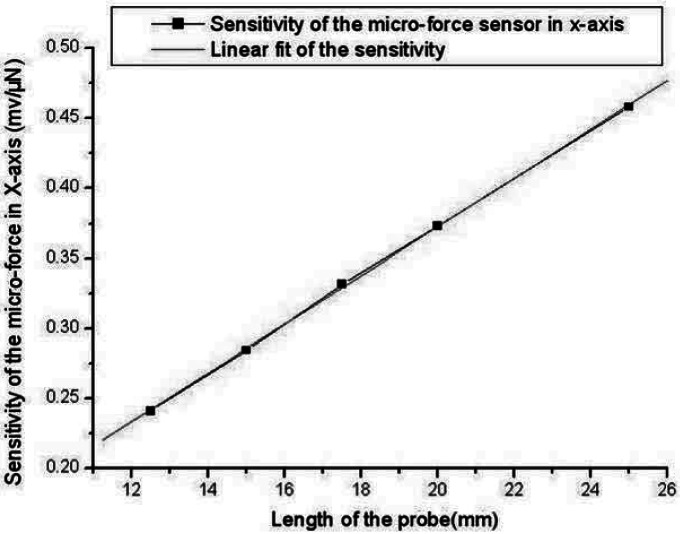
An integrated multifunction micro-sensor for three-dimensional micro-force precision measurement under different pressure and temperature conditions is introduced in this paper. The integrated sensor consists of three kinds of sensors: a three-dimensional micro-force sensor, an absolute pressure sensor and a temperature sensor. The integrated multifunction micro-sensor is fabricated on silicon wafers by micromachining technology. Different doping doses of boron ion, placement and structure of resistors are tested for the force sensor, pressure sensor and temperature sensor to minimize the cross interference and optimize the properties. A glass optical fiber, with a ladder structure and sharp tip etched by buffer oxide etch solution, is glued on the micro-force sensor chip as the tactile probe. Experimental results show that the minimum force that can be detected by the force sensor is 300 nN; the lateral sensitivity of the force sensor is 0.4582 mV/μN; the probe length is linearly proportional to sensitivity of the micro-force sensor in lateral; the sensitivity of the pressure sensor is 0.11 mv/KPa; the sensitivity of the temperature sensor is 5.836 × 10(-3) KΩ/°C. Thus it is a cost-effective method to fabricate integrated multifunction micro-sensors with different measurement ranges that could be used in many fields.
Keywords: glass optical fiber probe; integrated sensor; micro-force; pressure; temperature.
Figures










References
-
- Gao W., Motoki T., Kiyono S. Nanometer edge profile measurement of diamond cutting tools by atomic force microscope with optical alignment sensor. Precision Eng. 2006;30:396–405.
-
- Kim K., Cheng J., Liu Q., Wu X. Y., Sun Y. Investigation of mechanical properties of soft hydrogel microcapsules in relation to protein delivery using a MEMS force sensor. J. Biomed. Mater. Res. 2010;Part A92A:103–113. - PubMed
-
- Trejos A.L., Jayaraman S., Patel R.V., Naish M.D., Schlachta C.M. Force sensing in natural orifice transluminal endoscopic surgery. Surg. Endosc. 2011;25:186–192. - PubMed
-
- Bartsch M.S., Federle W., Full R.J., Kenny T.W. A multiaxis force sensor for the study of insect biomechanics. J. Microelectromech. Syst. 2007;16:709–718.
LinkOut - more resources
Full Text Sources
